һ�N�µ�120�����ģʽ��늉�Դ��׃����ģ�����о�
��Ӱ������
(�Ϻ���W�Ԅӻ�ϵ��200072)
ժҪ��ᘌ��F��늉�Դ��׃��( vsi)����ģ�͵ıˣ��������_�P��̖�������B��pwm��B����׃���Ķ�׃���_�P�����혋��늉�Դ��׃��ģ�ͣ�����matlab�h������s�������F��ԓģ�Ϳ�ͨ�^c���g���߾��g��windows�Ɉ��еĄӑB朽ӎ��ļ����O�����ϵ�y�����ٶȡ����M��ϵ�y�����C����ģ�͵���Ч�ԡ���Փ������ϵ�y�����������ԓģ��ͨ���ԏ������������@�ӿ�ϵ�y�����ٶȣ������ژ����ɿ�����Ч��ϵ�y�����о�ƽ�_��
�P�I�~���oˢֱ��늙C��늉�Դ��׃������׃���_�P������ģ��
�ЈD���̖��tm36 +1 �īI��־�a��a ���¾�̖��1001-6848{2010}07-0073-04
o�� ��
���о��oˢֱ��늙C�Q�D���}�����ƺ͟oλ�Â��������ƕr������ϵ�y���挍�F���Ʒ����Ŀ������о����P�I����������������׃��ģ����ϵ�y����Ļ���ģ�K��
��׃��������120�Ȍ��ģʽ�£���׃��ģ�ͱ�횰Ѿ��w�ēQ���^���w�F�����������������_�P������׃��ģ�͡���˅����īI[2]������������Ч�������_�P�������һ늉�������������newton-raphson�㷨�M�Д�ֵ��䏣���ԓ�������F���s���������īI[ 3-4]����matlab/powersim���ṩ��늚�ϵ�yģ�K�콨��ģ�͡�ԓ�������F���㣬��powerlibģ�K�csimulinkģ�K�����б��|�^�e����simulink�h�����M�з���ǰ��M�Џ��s��ʼ�����Ѱ���pow-erlibģ�K��ϵ�y�D����simulink�܉����ĵ�Чϵ�y����횲���׃���L������ܾ��_Ӌ����׃���^���c���@�����@����ϵ�y�����ٶȡ������M�Џ��s��Ӌ������ēQ���D���}�����Ʋ��Ժ͟oλ�Â��������Ʒ����о��r��ϵ�y�����ٶ��@��������Ҫ�����ڴ˱����о���ΏĹ��ܳ��l�������θ�Ч��120�Ȍ��ģʽ����׃��ģ�͡�
�īI[1]���īI[6]����׃�����ܳ��l������׃������һ���ں��ӣ������_�P�������佨ģ���@�N��ģ���������������������ڌ��F��ʹ���OӋ�z���Ʋ��Ե�����׃�ú������С�
���������������׃������ݔ����늉����ڂ��y�_�P����������A�ϣ���������늉����_�P��̖���������B��pwm��B�Ķ�׃���_�P��������������늉����_ʽ����׃����ͨ��B���H����׃�������늉�������Ķ�׃���_�P������������c�Z�Ծ�����s�������Ԍ��F��ԓ��׃��ģ��ͨ�^c���g���߾��g��wmdows�Ɉ��еĄӑB朽ӎ��ļ������ö����L���棬�O�������ϵ�y�����ٶȡ�ԓģ��ͨ���ԏ������Npwm���ƺ�pam���Ƶ�120�Ȍ��ģʽ�µ���׃�����m�ã�����ԓģ��߀���Ժ�����Ӌ���������������ؓ�d��늉�������ȼ���
1 120�Ȍ��ģʽ����׃��ݔ��늉�
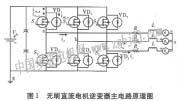
�oˢֱ��늙Cÿ���@�M���Ե�Ч����衢늸кͷ�늄ӄݴ����ɣ��O늙C���Q���tÿ���@�M����衢늸У������Ըкͻ��У��քe��ȣ��քe��rs��l��ʾ���D1��ʾ���Ч�·��������ʽ���·��
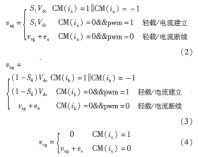
����׃�������Ϲܺ�ͨ�¹�pwm���ƕrs1- s6��ͨģʽ������������ݔ����늉����ГQ��si- s6��ͨģʽ��������늸еĴ��ڣ�����c���ca���g�Q����c��ͨ�^vd2�m�����m���Y����c���P�ࡣ�鶨����ʾ���������B�����xʽ(1)��ʾ���������О��С����������
���xpwm��B׃��pwm����1��ʾ��������pwm��ͨ����0��ʾ��������pwm�P�࣬��ͨģʽ��늙C�����늉�����ʽ(2)~ʽ(4)��ʾ��
c���m���Y��֮��ֻ��a��b����ͨ���˕r늙C�����c늉��飺
��ʽ(5)����ʽ(4)�ɵã�
ʽ(2)��ʽ(3)��ʽ(6)��a���Ϙ�ۡ�b������M�Ќ�ͨ�P |