�o�S��늙C�о�������ìF���c���g���A
���h��1��������2
��1�Ͼ���Ϣ�I���g�WԺ�����Ϣ�WԺ���Ͼ�210046;2�|�ϴ�W늚�̌WԺ���Ͼ�210096��
ժҪ�������˟o�S��늙C�ă��c�����Y�˟o�S��늙C�ĎN�����Y����Ԕ����B���о��M�̡��C���˟o�S��늙C�đ��ìF����cՓ�����������﹤�̡��댧�w���I��ʳƷ�����Լ��w݆���ܵ��I��đ��øśr����Y�˟o�S��늙C�����ӿ��Ƶ����P���g���A��
�P�I�~���o�S��늙C���о������ã����g���A
��Ȧ���̖��tm359.9 �īI��־�a��a ���¾�̖��1001-6848(2010)07-0081-04
o����
20���o�����ԁ������x�ęC�����ٙC���ȱ�������������Ҫ���ټ������ٵ�������ӡ����⣬�����﹤�̡����պ����늚�����I����Ҫ��o��Ⱦ���oĦ���ĸ�����늙C�ӡ���ͨ�Cе�S�д���Ħ����ĥ�p���ɴˎ���****�D���y��ͻ�ơ���������Ⱦ�Ȇ��}�����S�еij��F���M���˸��ٸ�����늙C��֧��Ҫ�őҸ��S�������ôň������D�ӑҸ��ڿ��g�����F�D�ӺͶ���֮�g�]���κΙCе���|��һ�N�����S�С������Пo�����������L���oĦ�����o�Cе���ȃ��c�����ڌ��H�\���У����S�е�ȱ����Ȼ���ڴ��S��ռ�����S���w�e�^����֧�е�늙C�Y���^����s������늙C��****�D�ٺ�****ݔ������Ҳ�ܵ����ơ���ˣ��Ⱦ߂���ͨ����늙C���c���ּ����S�Ѓ������ܞ�һ�w������늙C�o�S��늙C���\�������o�S��늙C��һ�N���͵ĸ��g�������߸���ֵ�ęC������D�Q�b�ã��_���˸���늙C�ӵ��¼oԪ��
1����Y��
�o�S��늙C���ڴőҸ��S��ԭ�����A�����Ƴ����ģ��������S���Юa������Ҹ������@�M�B�ӵ�늙C�����ϣ�ֻҪ�_��늙C�D���@�M�a���Ĵň��O����p���c����Ҹ����@�M�a���Ĵň��O����p2�M���Pϵ�䣻p2= pi��1��늙C�㲻�H�ܮa��늴��D�أ�߀�ܮa������Ҹ������o�S��늙C��һ���D��Ҫ���F�����Ҹ���Ҫ���傀���ɶ��M�п��ƣ�Ҳ�����fҪ֧�Пo�S��늙C��һ���D����Ҫ�ɂ��o�S��늙C��Ԫ��һ���S����S�У����Ѓɂ��o�S��늙C��Ԫ�ĽY����ȫһ�ӡ�
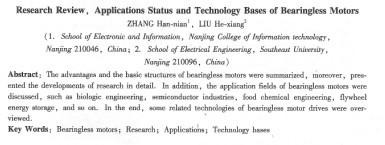
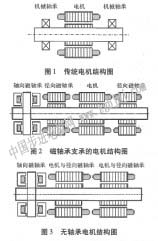
�D1����y�Cе�S��֧�е�늙C�Y���D�����S��֧�е�늙C�Y����ʽ�ж�N���D2������һ�N���@�N�Y����늙C���D����ȫ�Ҹ����Ƀɂ�������S�к�һ���S����S�У�늙C����ֻ�a��늴��D�ء�
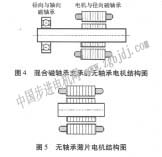
�D3��o�S��늙C�Y���D�����S�����ɶ��ɴ��S�Ё����ƣ�������S�еĹ�����늙C�팍�F���c�D2��ȣ���Y���õ��˺�����
�D4�鏽���S�������ɶȻ�ϴ��S��֧�еğo�S��늙C�Y���D���c�D3��ȣ���Y����ʽ�õ����Mһ��������
�D5��o�S�б�Ƭ늙C�Y���D�����D���S���L���c��ֱ����Ⱥ�С���H��һ���o�S��늙C��Ԫ���Ɍ��F�����Ҹ���ԓo�S��늙C�Y�����o���ͺ��Σ�****�ƏV���Ãrֵ��
2��M��
20���o70�����Ӣ���W��hermann�����һ�N�O�����քe��p��p+2���p�@�M���ӽY�����Ҿ����ԑҸ�������늴��b�á��c��ͬ�r�������W��meinke���������һ�N���x�@�M�ĴőҸ��b�á�1985�꣬�ձ��W��higuchi����˲��M�ʹőҸ�늄әC��1988�꣬��ʿ�W��bosch�l���˾����S�������ı�Ƭ�őҸ�늙C�����״�����ˡ��o�S��늙C���@�����
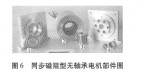
1990�꣬�ձ��|��������W��chiba�ȌW���״Ό��Fͬ������늙C�ßo�S�м��g���D6��ͬ�������͟o�S��늙C�әC�����D���D��1���o���Cе�S��1��2��3�քe��әC���ӡ��D�ӣ�4���D�ӽǶȜy��������o���T����
1993�꣬�K������WԺ��schob�״Ό��F�˽����Б�늙C�ğo�S�м��g���D7��o�S�иБ�늙C����D�����c��ͬ�r���_�P�����͟o�S��늙C�������͟o�S��늙CҲ���^���Ƴɹ���1995��֮�o�S��늙C���о��_ʼ�~�댍�� |