һ�N����ʽ��늾��a��z��̖(h��o)̎�������о�
���ڣ��������w����
(�|�ϴ�W(xu��)늚�̌W(xu��)Ժ�ŷ����Ƽ��g(sh��)�����������о����ģ��Ͼ�210096)
ժҪ���pͨ����ͨ�ГQ���ţ�dc-fspm��늙C(j��)��һ�N���͵ĸ߿ɿ��Զ���������늙C(j��)���������͔�(sh��)����̖(h��o)̎����tms320f2812���ȫ��(sh��)��dc��fspm늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)����������ʽ��늾��a������λ�Ùz�y(c��)�b�á����Qz��̖(h��o)�װl(f��)����̖(h��o)�Gʧ���M(j��n)����(d��o)��λ����̖(h��o)�۷e�`��Ć��}���O(sh��)Ӌ(j��)����̖(h��o)̎���·����(sh��)�(y��n)�Y(ji��)�����������O(sh��)Ӌ(j��)��λ����̖(h��o)̎��������Ч����dc-fspm늙C(j��)�M(j��n)һ�����о��춨�˻��A(ch��)��
�P(gu��n)�I�~������늙C(j��)����ͨ�ГQ�����ࣻλ�Ùz�y(c��)
�ЈD���̖(h��o)��tm351 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848( 2010) 07-0085-03
0�� ��
�S����(j��ng)��(j��)�Ŀ��ٰl(f��)չ���I(y��)�Ԅ�(d��ng)�����ռ�������늙C(j��)�ڹ��I(y��)���a(ch��n)�I(l��ng)��l(f��)�]Խ��(l��i)Խ��Ҫ�����á�����������늙C(j��)�˷��˂��y(t��ng)���D(zhu��n)��������늙C(j��)�T���ȱ�c(di��n)������늴����ܸ����c֮�������������(l��i)������(gu��)��(n��i)�����P(gu��n)�I(l��ng)��?q��)W�ߵ��P(gu��n)ע�����У����Դ�ͨ�ГQ���ţ�fspm��늙C(j��)���ܸ���(y��u)[3-5]�����M(j��n)һ�����fspm늙C(j��)�Ŀɿ��ԣ����ЌW(xu��)�ߌ����༼�g(sh��)���뵽fspm늙C(j��)����������Ͷ���������늙C(j��)�Y(ji��)��(g��u)�����pͨ����ͨ�ГQ����( dc-fspm)늙C(j��)�������о�������dc - fspm늙C(j��)�m����blac�����Ҳ������Ʒ�ʽ���@ҲҪ��dc- fspm늙C(j��)����ϵ�y(t��ng)��Ҫ�߾��ȵ�λ����Ϣ�����]�h(hu��n)���Ƶķ�����̖(h��o)�������x�ù�늾��a������λ�Ùz�y(c��)�b�á�����߹�늾��a����ds-fspm늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)�е����ܣ���(zh��n)�_�z�y(c��)λ����̖(h��o)���M�㌍(sh��)�H���Ƶ���Ҫ�����@���Ȟ���Ҫ��
���Ľ�B�˻���dsp��ȫ��(sh��)������ʽdc��fspm늙C(j��)����ϵ�y(t��ng)������������λ�Â�����������ʽ��늾��a��z��̖(h��o)�}�_�װl(f��)���Gʧ�Ć��}�������ϵ�y(t��ng)���\(y��n)�����ܣ��������һ�N��(ji��n)�ζ���Ч�Ľ�Q��������K�����w�������dc-fspm늙C(j��)����ϵ�y(t��ng)���\(y��n)�����ܡ�
1 dc-fspm늙C(j��)����ϵ�y(t��ng)
dc-fspm늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)��늙C(j��)��λ�ú����������������������׃�Q�·�M�ɡ����У�dc-fspm늙C(j��)�Ƀ�·���(d��)���Ĺ��ϵ�y(t��ng)�o�ɽM���a(b��)���@�M��늣����������Ҫ12·��pwm�}�_��̖(h��o)���ڌ�(sh��)�(y��n)ϵ�y(t��ng)�У�ͨ�^ܛ����(sh��)�F(xi��n)��(du��)������`����ƣ��@��(du��)ϵ�y(t��ng)̎����������Ҳ������ߵ�Ҫ��һ��Ć�Ƭ�C(j��)���y�_(d��)������Ҫ�����⣬ԓ늙C(j��)��늸к�С��늘��@�M�е����׃���ܿ죬����ʹ늘�����^�õĸ�ۙ���������׃��������Ҫ�����^���l�ʵ�pwm�}�_������߀Ҫ��ܸߵ�a/d�D(zhu��n)�Q�l�ʡ������x���tms320f2812��32λ�Ķ��c(di��n)dsp����Ҫ�eָ�����ǣ�ԓоƬ���Ѓɂ�(g��)��(d��)�����¼���������eva��evb�����������Ԟ�dc-fspm늙C(j��)ϵ�y(t��ng)�Ѓɂ�(g��)늚������(d��)���Ĺ����_�P(gu��n)�����ṩ12·ռ�ձȿ��{(di��o)��pwmݔ�����M��������ʽ늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)����Ҫ��
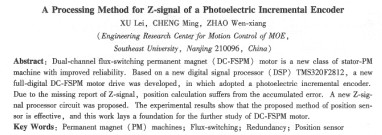
�D1�����O(sh��)Ӌ(j��)��dc-fspm늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)�Y(ji��)��(g��u)��D�����У���늾��a������λ�Ùz�y(c��)�h(hu��n)��(ji��)����ݔ����λ����̖(h��o)�͵�dsp������dsp��(sh��)�r(sh��)��Ӌ(j��)���λ�ú��D(zhu��n)����̖(h��o)��
2λ�Ùz�y(c��)��Ԫ
늙C(j��)�D(zhu��n)�ٙz�y(c��)ͨ���ЃɷN�z�y(c��)�ֶΣ�
�ٲ��Üy(c��)�ٰl(f��)늙C(j��)��
�ڲ����}�_�l(f��)�������y(c��)�ٰl(f��)늙C(j��)�z�y(c��)�������ޣ��ҟo(w��)���@֪늙C(j��)���D(zhu��n)��λ�ã����}�_�l(f��)�����c늙C(j��)ͬ�S�B�ӣ�ͨ�^�y(c��)�����y(c��)���w�����D(zhu��n)�ǶȲ����y(c��)���������D(zhu��n)�Ƕ��D(zhu��n)����һϵ�е��}�_���̖(h��o)ݔ����ͨ�^Ӌ(j��)��(sh��)����(du��)ݔ���}�_Ӌ(j��)��(sh��)�g�Ӝy(c��)����늙C(j��)���D(zhu��n)�ٲ�˷N�����z�y(c��)���ȿ����_(d��)���ܸߣ�����ͨ�^�z�y(c��)�}�_��(sh��)�����ԙz�y(c��)��늙C(j��)���D(zhu��n)��λ�á�
���õ��}�_�l(f��)�����й�늴a�P��늾��a���ɷN�����]늙C(j��)�D(zhu��n)��λ����늙C(j��)ʸ�����Ʒdz���Ҫ����̖(h��o)֮һ��tms320f2,812���¼�����������һ��(g��)�������a�}�_( qep)�·����ˣ����n�}�x�ù�늾��a������λ�Ùz�y(c��)��Ԫ��
2.1��늾��a��
��늾��a���ɹ�űP��늙z�y(c��)�b�Ãɲ��ֽM�ɡ���űP����һ��ֱ���ĈA�P�ϵȷֵ��_ͨ���ɂ�(g��)�L(zh��ng)���οס����ڹ�늴a�P�c늄�(d��ng)�C(j��)ͬ�S����(d��ng)늄�(d��ng)�C(j��)���D(zhu��n)�r(sh��)����űP�͕�(hu��)�c늄�(d��ng)�C(j��)ͬ�����D(zhu��n)���l(f��)����O�ܵ����Ԫ���l(f��)����͕�(hu��)���^��űP�����əz�y(c��)�b�Ùz�y(c��)��ݔ�������}�_��̖(h��o)����ԭ��ʾ��D��D2��ʾ����늾��a��ݔ����̖(h��o)��a��b��z��·��̖(h��o)������a��b���� |