����������ͬ��늄әC�������OӋ
��Y�����棬������
�Ї���ӿƼ����F��˾�ڶ�ʮһ�о������Ϻ���200233
�ЈD���̖��tm341 �īI���R�a��e
���¾�̖��1004-7018{2010)07-0069-01
o����
�t����������������l���ˑB����ϵ�y�Ĺ�W�ˑB���������яV���������S�����l��ƽ�_�С�����Ҫ�ɼt�����̽�y�������ܹ�W���D�Ӓ���C���������Ϣ̎��ϵ�y�Ȳ��ֽM�ɡ��D�Ӓ����әC���е�����ͬ��늄әC�����P�I���������������D�����R��������t��ݗ�䷴�䵽����̽�y�������ķ����ԡ��ɿ��Ժ��D�Ӿ��Ȍ�ֱ��Ӱ푵��t��������������ˑB�y�����ȡ������l�ǵ���܉ʹ��Ҫ��Խ��Խ�ߣ����t��������������D�Ӓ���C��һ������˸��ߵ�Ҫ��
1�����Y����ԭ��
1 1��������ͬ��늄әC�����Y��
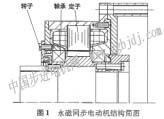
����������Ҫ�������ÿ��g���pС�w�e�����÷��bʽ�ĽY���OӋ����������ͬ��늄әC�Y�����D��D1��ʾ��
���˝M��ϵ�y�Ĺ�W��·Ҫ��늄әC�OӋ���п��D�S�ĽY����ʽ�����C늄әC���\�Еr�����ړ�ϵ�y�Ĺ�·��ͬ�r�ڽY�����������Ԍm�OӋ�����C늄әC���������\���^���в�����ʧ���_����ϵ�y�L�ڿɿ��\�С�늄әC�\���D�ٱ��^�ͣ�����OӋ���l�O�Pʽ�Y����ʹ���\���ڵ��ٴ�������r�¡�
늄әC�ĽY���o�������ø߾��ȹ�W���a������λ�Â���������˾��пɿ��Ըߡ����ƾ��ȸߵȃ��c��
1 2����ԭ��
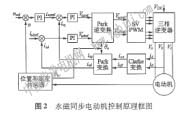
����ͬ��늄әC�������D�Ӯa���㶨��늴ň���������ͨ���������Q�����Ҳ�����늕r���a�����D�ň����ɷN�ň�����îa��늴������Ķ�ʹ�D�����D������׃ͨ�˶��������Դ���l�ʺ���λ���Ϳ��Ը�׃�D�ӵ��D�ٺ�λ�á���ˣ�����������ͬ��늄әC�Ŀ���Ҳ�c����늄әC�������ƣ���ֱ�Ӳ���ʸ�����ơ�
������ˮ��ͬ��늄әC�D����ͬ�S���bһ��λ�Â����������Á�y���D�ӵ�λ�á�ͨ�^�z�y�D�ӌ��Hλ��Ҳ���õ��D�ӵĴ�ͨλ�ã��Ķ�ʹ��������ͬ��늄әC��ʸ�������^�麆�Ρ�����ԭ����D��D2��ʾ��
2�OӋ���c
2 1���}������ͬ��늄әC�O������OӋ�����漼�g
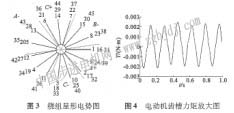
ᘌ����ٸ߷��پ��ȵ�Ҫ���҂����õ��ٴ����ص�ֱ�ʽ�д�ͬ��늄әC�����ˌ��F���D�ز���ϵ����Ҫ��ԓ늄әC�����˷֔����@�M�Y����ʽ���c�������@�M��ȣ����Ӳ��c�D�ӴŘO֮�g������λ���������ĘO�����Dz�ͬ�ģ��ʸ����X�C��늄��ڸ��O����ͬһ�������ی�����Ҳ�Dz�ͬ��ģ�����X�C��늄ݺϳɞ顤��Ŀ�늄ݕr�������������늄әC������6�ИO45�۵ķ֔����@�M�OӋ���@�M����늄݈D��D3��ʾ��ͬ�r�M������Ԫ���������OӋ���ڱ��C�\���D�Ǻ��D��ϵ���ėl���£�����늄әC�Ķ�λ����ͬ�r��ʹ늄әC���\��ƽ���������������ƣ�늄әC���X���D�ط��沨����D4��ʾ��
ԓ늄әC�OӋ�w�F���w�eС�������p�����ȸߺͿɿ��Ըߵ����c��ᘌ���ؓ�d�ǹ�WԪ�������ˌ��F�߿��ƾ��ȵ�Ҫ����ֱ���ӷ�ʽ��ʡȥ�˜p�ٙC���������w�eС�������p�ă��c��ͬ�r�M���λ�����������D�ز���ϵ��С�Լ������L��Ҫ��
2 2�߾����{�ٵ��i����Ƽ��g
����ͬ��늄әCͬ�S���b�߾���λ�Ùz�yԪ��������߿��ɔ_�������{�پ���һ���ø߾����{�ٵ��i�༼�g�����������F�߷��پ�����Ҫ���Ժ��ε��·��ʽ�_��������Ӳ��M���i����B�����~����B�L�ڹ����r��늄әC�ٶȲ��ܜضȼ�ĥ�p��Ӱ푣���Ч�����D��Ư�ƣ��Ķ��_�����١�
3�yԇ�Y��
�҂�������ͬ��늄әC���������M��r�yԇ��늄әC�~������5w���~���D�ٞ�60 r/min��ݔ��늉���24 v (dc)���{�ٷ�����10~ 60 r/min��늄әC�܉�ƽ�����ӣ������~���D�ٺ��~�����ʃȷ����\�С��yԇ�Y�����1��ʾ��Ŀǰԓ늄әC�������ѳɹ������ں������ļt������������С�
|