isg����ͬ��늙C��(sh��)�ֿ���ϵ�y(t��ng)�O(sh��)Ӌ
�鸂�ۣ�ȫ����ξ܊܊�������ꗝ
�����K��W(xu��)�����K�(zh��n)��212013��
ժҪ�����Ⱥ��ν�B��iscϵ�y(t��ng)ԭ����Ȼ���B����twis320f2812dsp����Ŀ����������ܹ���ģ�K��Ӳ��ϵ�y(t��ng)��ͬ�r�o������������P(gu��n)�ӳ�������ͬ���������Փ�о��Ļ��A(ch��)�������܇������ͬ��늙C���ӌ���_���O(sh��)Ӌ���{(di��o)ԇ�����әC��r���ӌ���C�ˌ��Y(ji��)���c����Y(ji��)����һ��ꑡ�
�P(gu��n)�I�~��tms320f2812dsp;���ܹ���ģ�K������ͬ��늙C
�ЈD���̖��tm341 �īI��(bi��o)�R�a��a ���¾�̖��1004-7018(2010) 07-0054-03
o����
��������S�������Ӽ��g(sh��)����Ӽ��g(sh��)������늙C������Փ��ϡ�����Ų��ϵĿ��ٰl(f��)չ������ͬ��늄әC�õ�Ѹ�ٵ��ƏV��(y��ng)�á�Ŀǰ�ѽ�(j��ng)�V����(y��ng)���ں�������܇�ϵ����ӣ��l(f��)�һ�w��ϵ�y(t��ng)�С����Ľ�B��iscϵ�y(t��ng)��ԭ����Ȼ�����tms320f2,812dsp�������̎�����Ŀ����������ܹ���ģ�Krl���O(sh��)Ӌ����ͬ��늙C�Ĕ�(sh��)�ֿ���ϵ�y(t��ng)��ԓϵ�y(t��ng)Ӳ���·�Y(ji��)��(g��u)���Σ����ڌ��F(xi��n)�����Ҿ��Ѓ�(y��u)�����\��������ܡ�ͬ�r����dsp�����\�㹦�ܣ�ʹ��ԓϵ�y(t��ng)����څ�����ܻ��Ͷ�ܻ���
1 isgԭ��
��܇�ϲ��õ����әC�Ͱl(f��)늙C�ǃɂ���Ҫ�ķ��x����b�ã������ڸ��Ե�λ���Ϸքe�Г�(d��n)���ӺͰl(f��)늵��΄�(w��)�������ӣ��l(f��)�һ�w����һ�N�����ӺͰl(f��)늹��ܻ���һ�w��늙C�����ӣ��l(f��)�һ�w��ϵ�y(t��ng)����������M�ɡ�늙C��ϵ�y(t��ng)�Ĉ�(zh��)�ЙC��(g��u)�����ӺͰl(f��)늙C���ܾ���ͨ�^���팍�F(xi��n)�ġ���ԭ�������l(f��)늙C��������늙C�ã����������D(zhu��n)�Q�Ƕȁ�����늙C������D(zhu��n)����Cе�ܣ�����늄әC�\�У������Ӻ͵����\�Еr���l(f��)�әC����Ч�ʺܵͣ��˕r��Ҫ����늄әC���o���(q��)�ӣ��@�ӿ��Խ����ͺģ��p�ٶ�����̼���ŷ�������(d��ng)��܇�_��ijһ�ٶȺ�늙C���Cе���D(zhu��n)������ܣ����ǰl(f��)늙C�\�С��l(f��)�әC���ٻ���܇�x܇�r�����ƄәCе�ܣ�늙C�����l(f��)늠�B(t��i)����늳س�늣���(d��ng)��܇���ٻ��^�d�r��늄әC�c�l(f��)�әC�f(xi��)�{(di��o)�������a��l(f��)�әC�����IJ��㡣�κ�һ�_늙C���������@�ɷN��B(t��i)֮�g�D(zhu��n)�Q����늙C�Ŀ�����ԭ����
���Ľo����һ�Nisg����ͬ��늙C�Ĕ�(sh��)�ֿ���ϵ�y(t��ng)��Ŀǰᘌ�ԓϵ�y(t��ng)�ɹ��x���늙C��Ҫ������ͬ��늙C���_�P(gu��n)����늙C���oˢֱ��늙C�ȵȣ�
2��(sh��)�ֿ���ϵ�y(t��ng)��Ӳ���Y(ji��)��(g��u)
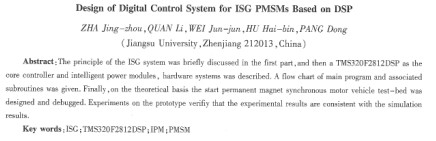
ϵ�y(t��ng)Ӳ��ƽ�_�Ŀ��ư�����tms320f2812оƬ����ģ����F(xi��n)����늙C����ϵ�y(t��ng)���_�h(hu��n)�����]�h(hu��n)��ȫ�]�h(hu��n)�ĸ߾��ȿ��ơ�ϵ�y(t��ng)Ӳ����Ҫ��������ͬ��늙C������·��ϵ�y(t��ng)���ƻ�·����D1��ʾ��
�ɈD1��֪������·������Ҫ���������h(hu��n)��(ji��)���V���h(hu��n)��(ji��)����׃����ϵ�y(t��ng)���ƻ�·����dsp���(q��)���·���z�y�·�����o�·�ȡ�
tm5320f2812ͨ�^����z�y��Ԫ�@������Ҫ�������̖����λ�Ùz�y���@������Ҫ���D(zhu��n)��λ����̖����ͨ�^�c��λ�Cͨ�ū@�ýo����λ�á��D(zhu��n)�ٺ��\�з�ʽ����(j��ng)�^һϵ�е�׃�Q���^���\�㣬�@������ ��pwm��̖��pwm��̖��(j��ng)�^������x����ipmģ�K����pmsm��
2 1����z�y��Ԫ
����ɘӕr�����Rķ��˾��lts6 -np�������������̖̎���·����̖�ķŴ��늉�ƫ���·�M�ɡ����ԓϵ�y(t��ng)dsp��a/dģ�K�ą���늉��O(sh��)����0~3.3 v�����ɘ���̖��������ҵĽ�����̖������Ѳɘ���̖׃�Q��-1.6 v��+1.6 v֮�g��Ȼ����ƫ�õ�o��3.3 v֮�g��tms320f2812��l2λģ��(sh��)�D(zhu��n)�Q����(n��i)�õIJɘӱ�������2��8ͨ����ݔ�˶�·�D(zhu��n)�Q�������ڲɘ�ϵ�y(t��ng)��ݔ���ķ�����o~33v��adcģ�Mݔ��?y��n)���늉��ĵ�늉�ݔ��˽ӵأ���늉�ݔ��˽?,3 v���D(zhu��n)�Q�ֱ��ʞ�3.3/1 024 v��
2.2λ���c�ٶșz�y�·
ԓϵ�y(t��ng)늄әC�D(zhu��n)���ٶȵęz�y�·��������ʽ��늴a�P�z�y������ݔ�������Á�z�y�D(zhu��n)�ӵ��ٶȡ���늴a�P�z�y�����ȸߣ�ݔ����̖���^ƽ��������V������ֵҲ����늄әC�D(zhu��n)�ٵ�Ӱ푡���(d��ng)늄әC�\�D(zhu��n)�r����늴a�P�S֮ͬ�S���D(zhu��n)�����l(f��)��a��b�ɽM�}�_��һ�Mͬ���}�_c��̖��a��b�ɽM�}�_��̖���l����ͬ���l�ʵĿ�����늄әC�D(zhu��n)�ٳ����ȣ����Ը���(j��)���}�_��ǰ�ص��_�r�̲�ͬ���Á��Д�늄әC�������D(zhu��n)������늄әC���D(zhu��n) |