�����i��h��늙C����ϵ�y�еđ���
�n���w���磬 ʷ־��
���������ù�W�о������������710065��
ժҪ����B��һ�N���ڔ��ֻ��i��h��늙C����ϵ�y��ᘌ�Ŀǰ�ڴ�늙C�ŷ�ϵ�y��ʹ�Â��yģ�M���Ʒ�ʽ����r��ʹ�ô�Ҏģ�ɾ���߉�����M��늙C�Ĕ��ֻ����ơ��������i��h��ԭ�������ԣ���B�˿���ϵ�y�ĽM�ɺ��ܡ�ᘌ�ԓϵ�y�Ќ��r����̎����Ҫ�������һ�N���ڏ��s�ɾ���߉������( cpld)��늙C���Ʒ�����ʹ��epm7128s����������оƬ�������OӋʹ��vhdi���Z�Ծ���������Y������ԓϵ�y�����^�õ������Ժ;��_�ԣ�������늙C���{�����ܡ�
�P�I�~�������i��h�����s�ɾ���߉������i��늄ݷ���늙C����ϵ�y
�ЈD���̖��tm 30i.2�īI��־�a��a���¾�̖��1673-6540(2010)07-0037-05
0����
�i��h·(pll)��һ���܉��ۙݔ����̖��λ���]�h�Ԅӿ���ϵ�y������խ����ۙ���ܡ�ݔ��ݔ����̖֮�g�������l�ʲ��ֻ�к�С�ķ��B��λ����к��Ŀ��ɔ_�ԡ��������Ժ�ͬ����ۙ���ܣ������ͨ�š����_�����졢������Ӌ��C��늄әC���Ƶ��I��@���ˏV�����ã���u�ɞ�����O���г��õ�һ�N�����������S����Ҏģ�������ٔ��ּ����·�İlչ��Ӌ��C���ձ鑪�ã����F��ȫ���ֻ�pll�����h·����ȫ�����ֻ������Ô����b����( digitalm�����Ŀ���Ї���ʿ������Y�����(dpd)�����֭h·�V����(dlf)��������ʎ��(dco)����pll�����ֻ��i��h���·��ȫ���ֻ��������ɔ_С��ϵ�y�ɿ��Դ����ߡ������h·������ֱ����̎��C��ģ�M���F��
ʹ���i��h�M��늙C���ٶȷ������ƣ����п��ƾ��ȸߡ��D���������i���r�g�̵ȃ��c�����ľ�ʹ�Ô����i��h�����ٶȷ����h���M���ٶȿ��ơ�ͨ�^vhdl�Z�Ծ��������i��h�����i�ʽ�M��늙C����ϵ�y�ٶȻ�·�ķ������ơ�
1 �����i��h��ԭ��
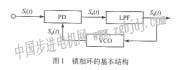
�i��h������ĽY����D1��ʾ�������b����(pd)���h·�V����(lpf)�͉�����ʎ��(vvco)�������������M�ɡ�pd����λ���^�b�ã���ݔ����̖si(t)��vcoݔ����̖s0(t)����λ�M�б��^���a�������ڃɂ���̖��λ����`��늉�s0(t)��lpf�������ǞV���`��늉�se(t)�еĸ��l�ɷֺ������Ա��C�h·��Ҫ������ܣ�����ϵ�y�ķ����ԡ�vc0�ܿ���늉�sd(t)�Ŀ��ƣ�ʹvc0���l����ݔ����̖���l�ʿ��n��ֱ�������l����i����
˲�r�l�ʺ�˲�r��λ���Pϵ����
�ӵ�pd�ăɂ���ʎ��̖���l�ʲ��
�˕r��˲�r��λ���
��wr=wv�r���Ц�w(t)��0�����ǣ�
�ɴ˿�֪�����ɂ���ʎ���l����ȕr��������˲�r��λ����һ��������
ͬ�ӵĵ����������e(t)=��0���t��
Ҳ�͵õ���wr=wv���C���ˮ��ɂ���ʎ��̖��˲�r��λ���һ�����r���ߵ��l�ʱ�Ȼ��ȡ�
���]�h�l���£��������ij�Nԭ��ʹvco�Ľ��l�ʰl��׃�����t�������ɂ���̖�g����λ����Ǻ㶨ֵ��pd��ݔ��늉�Ҳ�����l������׃����ԓ׃����늉�ʹvc0���l�ʲ����׃��ֱ��wr=wv��ֹ���@����pll�Ļ���ԭ����
һ�㔵��pll�ĽM���cģ�Mpll��ͬ��������λ�z������lpf��vc0�Ȼ����������ɣ����@Щ����ȫ�����Ô����·��ݔ����̖���ɘӲ��c�h·ݔ���ı��ع�����̖����λ���^���a��һ���c������λ�`��ɱ����Ĕ��֘ӱ����С��@��������λ�`���С�͘O |