|
һ�N���P��(ji��)�C����ֱ�늙C���b�ã����D�S��؞������ֱ�늙C�����Dֱ�늙C���ĵĿ����S������ֱ�늙C�c���Dֱ�늙C֮�g߀�̶���һ���B�������B�������϶ȏ��^��ʹ�����������У��B�������϶���һ���m�P��ԓ���m�P�c����ֱ�늙C���¶��B�ӣ��B�������¶�Ҳ��һ���m�P��ԓ���m�P�c�����Dֱ�늙C���϶��B�ӣ��B�����ȏ��^С���¶ι̶������Dֱ�늙C��ݔ���S�ϣ����D�S���^����ֱ�늙C�����Ђ��ӷ��m�����ӷ��m�c���D�S֮�g���S��֧�Σ����Dֱ�늙C���ӽӿ��c��λ�C�B�ӡ� �������ش��ܶȸߡ��ɱ��͡��Y���o�������ڰ��b�;S�o�����c���ɲ����\�ӿ��ƿ�����Ƭ�C��PLC���}�_�l(f��)��������λ�C���ƣ��m���ڶ��P��(ji��)�C���˵��Ӳ��֡�
һ��һ�N���P��(ji��)�C����ֱ�늙C���b�ã������cһ�����D�S(1)���B��һ������ֱ�늙C(5)��һ�����Dֱ�늙C(8)�����������ڣ����D�S(1)��؞������ֱ�늙C(5)�����Dֱ�늙C(8)���ĵĿ����S������ֱ�늙C(5)���¶��B�л���(9)������ֱ�늙C(5)�c���Dֱ�늙C(8)֮�g߀�̶���һ���B����(6)���B����(6)�ăȏ���׃���Π�B����(6)���϶ȏ��^��ʹ����(9)�������У�������(9)Ƕ���B����(6)���жȣ��B����(6)���϶���һ���m�P��ԓ���m�P�c����ֱ�늙C(5)���¶�������B�ӣ��B����(6)���¶�Ҳ��һ���m�P��ԓ���m�P�c�����Dֱ�늙C(8)���϶�������B�ӣ��B����(6)�ȏ��^С���¶ι̶������Dֱ�늙C(8)��ݔ���S�ϣ��������D�S(1)���^����ֱ�늙C(5)�����Ђ��ӷ��m(2)�����ӷ��m�c���D�S֮�g���S��(4)֧�Σ� �S�Љ��w(3)�����(10)���o�S�С� ���c���ӷ��m(2)�̶��B�ӣ����Dֱ�늙C(8)���ӽӿ��c��λ�C�B�ӡ�
��������(j��)1�����Ķ��P��(ji��)�C����ֱ�늙C���b�ã����������ڣ��������D�S(1)��Û�o��(7)���Nᔻ��B���I�c�B����(6)�̶��B�ӡ�
��������(j��)1��2�����Ķ��P��(ji��)�C����ֱ�늙C���b�ã����������ڣ�������λ�C�����\�ӿ��ƿ���λ�C����Ƭ�C��P L c���������}�_�l(f��)���������P��(ji��)�C����ֱ�늙C���b��
(һ)���g�I���������漰һ�N늙C���b�ã��e��һ�N�����Ӷ��P��(ji��)�C���˵��P��(ji��)���D��ֱ�늙C���b�á�
(��)�������g�S���ƌW���g���M�����C���˼��g�ѽ����V�������ڹ��r�I(y��)���a�����С����õȸ����I���P��(ji��)�C����һ����Ѓɂ��������D�P��(ji��)��늙C���b�ò�����ÿһ���P��(ji��)�ϣ����P��(ji��)�D�ӣ��C����ĩ�˵��\��܉�E��ׂ��P��(ji��)�\�ӵĺϳɡ��C���˵�ĩ���ڶ�λ�r��(sh��)��(j��)Ӌ�����^����ϵ�y(t��ng)�ijɱ��^�ߣ����y(t��ng)��늙C���b�ýY����ɢ�����ȵ͡��������ơ�
(��)�������̓��ݱ��������͵�Ŀ�����ṩһ�N���P��(ji��)�C����ֱ�늙C���b�ã�Ҫ��Q���y(t��ng)��늙C���b�ýY����ɢ�����ȵ͡��������Ƶļ��g���}������Qֱ�늙C���b�óɱ��ߵĆ��}��
�錍�F(xi��n)����Ŀ�ģ����������Ͳ������¼��g������
�@�N���P��(ji��)�C����ֱ�늙C���b�ã������cһ�����D�S1���B��һ������ֱ�늙C5��һ�����Dֱ�늙C8�����������ڣ����D�S1��؞������ֱ�늙C5�����Dֱ�늙C8���ĵĿ����S������ֱ�늙C5���¶��B�л���9������ֱ�늙C5�c���Dֱ�늙C8֮�g߀�̶���һ���B����6���B����6�ăȏ���׃���Π�B����6���϶ȏ��^��ʹ����9�������У�������9Ƕ���B����6���жȣ��B����6���϶���һ���m�P��ԓ���m�P�c����ֱ�늙C5���¶�������B�ӣ��B����6���¶�Ҳ��һ���m�P��ԓ���m�P�c�����Dֱ�늙C8���϶�������B�ӣ��B����6�ȏ��^С���¶ι̶������Dֱ�늙C8��ݔ���S�ϣ��������D�S1���^����ֱ�늙C5�����Ђ��ӷ��m2�����ӷ��m�c���D�S֮�g���S��4֧�Σ��S�Љ��w3�����10���o�S�С����c���ӷ��m2�̶��B�ӡ����Dֱ�늙C8���ӽӿ��c��λ�C�B�ӡ�
�������D�S1����Û�o��7���Nᔻ��B���I�c�B����6�̶��B�ӡ�
������λ�C�ɰ����\�ӿ��ƿ���λ�C����Ƭ�C��P L c���������}�_�l(f��)������
�c�F(xi��n)�м��g��ȱ��������;����������c������Ч����
���������������D�S�����ӷ��m���S�С��S�Љ��w������ֱ�늙C���B������Û�o�ס����Dֱ�늙C�M�ɡ������D�S1���B����6����Û�o��7�B�ӣ��Y�����Σ����Ķ�λ���ȸߣ����D�S1�͂��ӷ��m2֮�g�b���S��4����������D�S�Ą��ȣ����D�S1�OӋ�ɿ����S��ʹ�ÙC ����ǰ�˸��N�ܾ��ɲ������С�ʹֱ�늙C�l(f��)չ�ɞ�һ�����õ��b�ã����������ش��ܶȸߺͳɱ��͵����c�����ñ��������Ϳ�ʹ�ö��P��(ji��)�C���˵��P��(ji��)��λ�Y�����Ӿo�������о������ױ��C�����ڰ��b�;S�o�ă�(y��u)�c�����������͵�늙C�ӽӿڷ����^�V���ɲ����\�ӿ��ƿ�����Ƭ�C��P L c���}�_�l(f��)��������λ�C�M�п��ƣ��m���ڸ��N�I���еĶ��P��(ji��)�C���ˡ�
(��)���D�f������Y�ϸ��D���������������Mһ��Ԕ�����f����
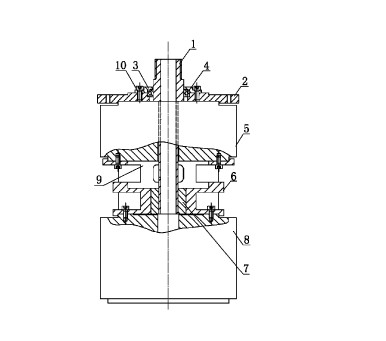
�D1�DZ��������͵ĽY��ʾ��D��
���D��ӛ��1һ���D�S��2һ���ӷ��m��3һ�S�Љ��w��4һ�S�С�5һ����ֱ�늙C��6һ�B������7һÛ�o�ס�8һ���Dֱ�늙C��9һ������10һ��ᔡ�
(��)���w��ʩ��ʽ��ʩ����Ҋ�D1��ʾ���@�N���P��(ji��)�C����ֱ�늙C���b�ã������cһ�����D�S1���B��һ������ֱ�늙C5��һ�����Dֱ�늙C8�����Dֱ�늙C8���ӽӿ��c��λ�C�B�ӣ�������λ�C�����\�ӿ��ƿ���λ�C����Ƭ�C��P L c���������}�_�l(f��)������
���D�S1��؞������ֱ�늙C5�����Dֱ�늙C8���ĵĿ����S������ֱ�늙C5���¶��B�л���9������ֱ�늙C5�c���Dֱ�늙C8֮�g߀�̶���һ���B����6���B����6�ăȏ���׃���Π�B����6���϶ȏ��^��ʹ����9�������У�������9Ƕ���B����6���жȣ��B����6���϶���һ���m�P��ԓ���m�P�c����ֱ�늙C5���¶�������B�ӣ��B����6���¶�Ҳ��һ���m�P��ԓ���m�P�c�����Dֱ�늙C8���϶�������B�ӣ��B����6�ȏ��^С���¶ι̶������Dֱ�늙C8��ݔ���S�ϣ��������D�S1����Û�o��7���Nᔻ��B���I�c�B����6�̶��B�ӡ�
�������D�S1���^����ֱ�늙C5�����Ђ��ӷ��m2�� ���ӷ��m�c���D�S֮�g���S��4֧�Σ��S�Љ��w3�����10���o�S�С����c���ӷ��m2�̶��B�ӡ�
�����������ɂ���ֱ�늙C���������Dֱ�늙C��ݔ����ͨ�^�B�����B����һ�����D�S���^����ֱ�늙C��Û�o���c�B�����B�ӣ� ���ӷ��m�c���D�Sͨ�^�S��֧�Σ��S�Љ��w���o�S�С����Dֱ�늙C8��ݔ���S����λ�C�������D�����������D�S1ʹ����ֱ�늙C5���D�����ӷ��m�����c��һ�P��(ji��)���әC���B�ӣ����F(xi��n)���P��(ji��)�C�����P��(ji��)�ďͺ�܉�E�\�ӡ�

(li��n)ϵ��ʽ��
�����r����Ⱥ����Ƽ�����˾
(li��n)ϵ�ˣ��RС��
(li��n)ϵ�Ԓ��13366662393
qq��13366662393
����̖��0��������0
�]���ַ��13366662393@qq.com
�Ԍ���ַ��http://www.taisu.net.cn/bbs_read.asp?id=4878&page=1 | 


