|
1. һ�N�ŷ�늙C���Ʒ��������������ڣ��������²��E��
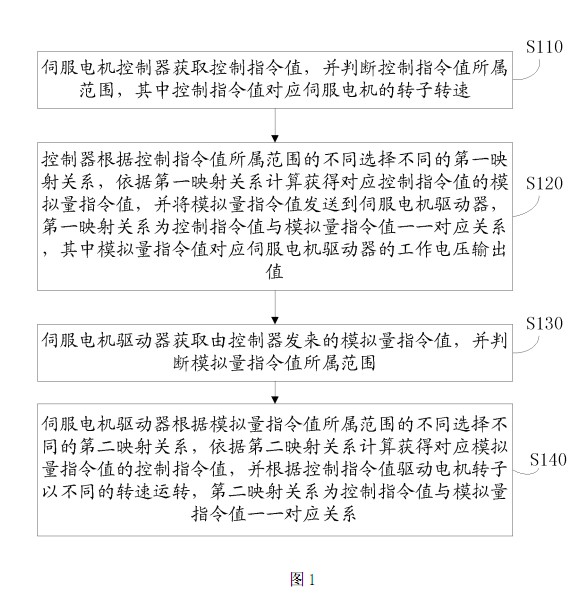
�ŷ�늙C�������@ȡ����ָ��ֵ�����Д���������ָ��ֵ���ٷ�����������������ָ
��ֵ�����ŷ�늙C���D���D�٣� ��������������(j��)��������ָ��ֵ���ٷ����IJ�ͬ�x��ͬ�ĵ�һӳ���Pϵ������(j��)����
��һӳ���PϵӋ��@�Ì�������ָ��ֵ��ģ�M��ָ��ֵ����������ģ�M��ָ��ֵ�l(f��)�͵���
���ŷ�늙C������������һӳ���Pϵ�����ָ��ֵ�cģ�M��ָ��ֵһһ�����Pϵ������
����ģ�M��ָ��ֵ�����ŷ�늙C�����Ĺ���늉�ݔ��ֵ��
2. ����(j��)����Ҫ��1 �������ŷ�늙C���Ʒ��������������ڣ�����������������(j��)����ָ
��ֵ���ٷ����IJ�ͬ�x��ͬ�ĵ�һӳ���Pϵ��ͨ�^Ӌ��@�Ì�����ģ�M��ָ��ֵ�IJ��E
֮�У�
�����������@�õĿ���ָ��ֵ��****ֵԽС����������ָ��ֵ�c��������������ݔ
����ģ�M��ָ��ֵ�ı�ֵԽС��
3. ����(j��)����Ҫ��2 �������ŷ�늙C���Ʒ��������������ڣ��������ŷ�늙C�������@
ȡ����ָ��ֵ�IJ��E֮ǰ��������
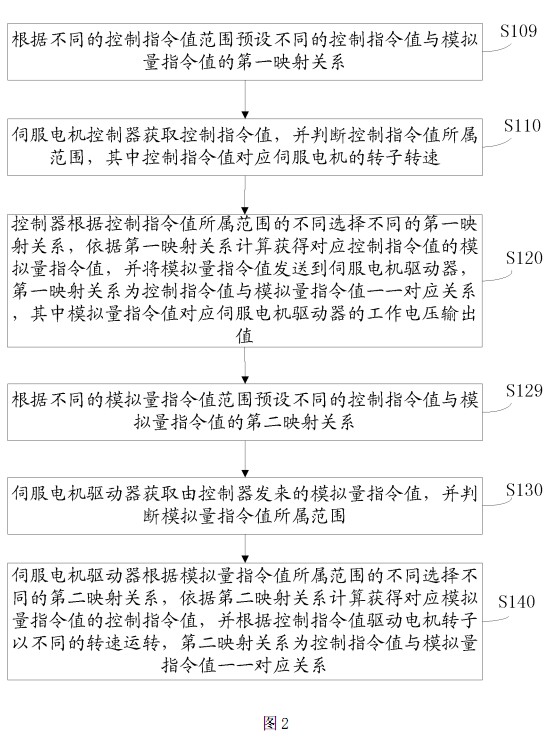
����(j��)��ͬ�Ŀ���ָ��ֵ�����A�O��ͬ�Ŀ���ָ��ֵ�cģ�M��ָ��ֵ�ĵ�һӳ���Pϵ��
4. ����(j��)����Ҫ��3 �������ŷ�늙C���Ʒ��������������ڣ���������ָ��ֵ�cģ�M��
ָ��ֵ�ĵ�һӳ���Pϵ���w�飺
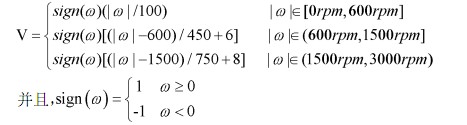
���У�V ��ģ�M��ָ��ֵ����������늉�ݔ��ֵ�����ǿ���ָ��ֵ�������D���D�١�
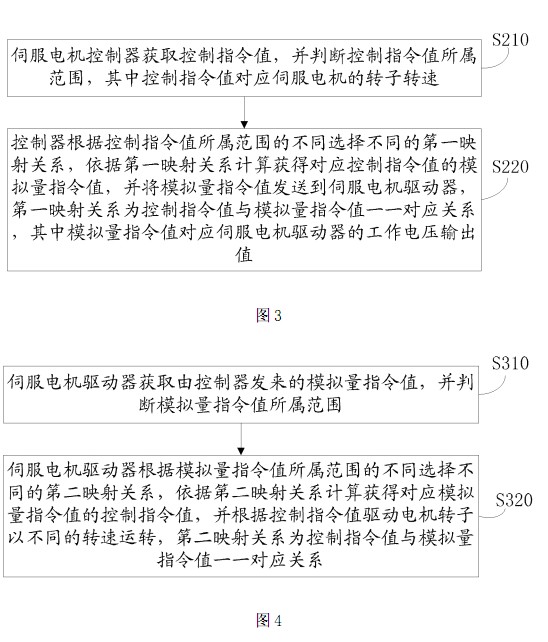
5. ����(j��)����Ҫ��2 �������ŷ�늙C���Ʒ��������������ڣ���������߀������
�����ŷ�늙C�����@ȡ�������������l(f��)����ģ�M��ָ��ֵ�����Д�����ģ�M��ָ��
ֵ���ٷ�����
�����ŷ�늙C��������(j��)����ģ�M��ָ��ֵ���ٷ����IJ�ͬ�x��ͬ�ĵڶ�ӳ���P
ϵ������(j��)�����ڶ�ӳ���PϵӋ��@�Ì���ģ�M��ָ��ֵ�Ŀ���ָ��ֵ��������(j��)��������ָ
��ֵ��늙C�D���Բ�ͬ���D���\�D�������ڶ�ӳ���Pϵ�����ָ��ֵ�cģ�M��ָ��ֵ
һһ�����Pϵ��
6. ����(j��)����Ҫ��5 �������ŷ�늙C���Ʒ��������������ڣ��������ŷ�늙C������
��(j��)ģ�M��ָ��ֵ���ٷ����IJ�ͬ�x��ͬ�ĵڶ�ӳ���Pϵ��
ͨ�^Ӌ��@�Ì����Ŀ���ָ�� ֵ�IJ��E֮�У����������@�õ�ģ�M��ָ��ֵ��****ֵԽС��������������ݔ������
������ָ��ֵ�cģ�M��ָ��ֵ�ı�ֵԽС��
7. ����(j��)����Ҫ��6 �������ŷ�늙C���Ʒ��������������ڣ��������ŷ�늙C�����@
ȡ�������������l(f��)����ģ�M��ָ��ֵ�IJ��E֮ǰ�������� ����(j��)��ͬ��ģ�M��ָ��ֵ�����A�O��ͬ�Ŀ���ָ��ֵ�cģ�M��ָ��ֵ�ĵڶ�ӳ���Pϵ��
8. ����(j��)����Ҫ��7 �������ŷ�늙C���Ʒ��������������ڣ���������ָ��ֵ�cģ�M��
[0001] ���l(f��)����ʩ���漰늙C�I���e���漰һ�N�ŷ�늙C���ơ��ӷ��������ƶˡ�
�Ӷ˼���(sh��)�ؙC����
�������g
[0002] Ŀǰ��Ҋ�������D�ٿ���ָ��ӿڣ�������ģ�M��ָ��ӿڣ�����λ�Cͨ�^�l(f��)
��һģ�M����̖����l(f��)��늉�ֵ��-10V ��+10V ��ģ�M����̖�����Եؿ����ŷ�늙C���D
��(��-3000rpm ��3000rpm)��
[0003] ���@�N�����У���λ�C��ͨ�^��(sh��)ģ�D�Qģ�K����(sh��)��ָ����̖�D����ģ�Mָ����
̖��ԓָ��ͨ�^�������f���ŷ��������ŷ������е�ģ��(sh��)�D�Qģ�K�ٌ�ԓģ�Mָ����
̖�D�Q�锵(sh��)��ָ����̖��
[0004] ��ģ�M���Ŀ�����̖������������f�o�����Ŀ���ָ���̖�ľ��Ȍ�����Ч
����Ӱ푷dz�������ָ����fģʽ�У�������̖�ľ�����Ҫ�ܰl(f��)�Ͷ˔�(sh��)ģ�D�Q���ȡ���ݔ
�^���еĔ_�ӡ��Լ����ն�ģ��(sh��)�D�Q���ȵ�Ӱ푡�
0005] ������̖����Чλ��(sh��)һ����10 ��12 λ(���M��)���߶�ϵ�y(t��ng)�܉��_��14 ��16 λ��
[0006] ����Ո�l(f��)�������L���аl(f��)�аl(f��)�F(xi��n)���ڌ��H�����������ǙC��ʹ���У�Ҫ��߾���
���Ƶ��D�ٷ���һ�㲻��ȫ�ٷ��������ǵ��ٷ�������3000rpm ��늙C�������߾��ȿ�����
��һ��l(f��)����-600rpm ��600rpm ���D�ٷ����ȡ����Ծ����Pϵӳ�䣬������ģ�M��������
̖�ķ�ֵ��-2V ��2V ֮�g��
[0007] ��ģ�M��ָ����Ʒ�ʽ�£��D�ٿ��Ƶľ�����Ҫȡ�Q��ģ�M늉���̖��
���ȡ������]��ݔ�^���еĔ_��Ӱ��£���늉����Ȟ�0.1V���t�D�ٿ��Ƶľ��Ȟ�
(3000rpm)* (0.1V)/ (10V) ��30rpm����ԓ�_��Ӱ���ȫ�������ڣ������S�����H�D��ֵ��
�Ͷ��pС����ˣ�����Ҫ�߾��ȿ��Ƶ�-600rpm ��600rpm �D�ٷ����ȣ��������ƾ��ȕ���
��30rpm/600rpm ��5����
[0008] �ɴ˿�Ҋ���ڵ��D�كȣ��������D�ٷ�����-600rpm ��600rpm ֮�g�r�����ƾ����^
�͡�
�l(f��)������
[0009] ���l(f��)����ʩ����Ҫ��Q�ļ��g���}���ṩһ�N�ŷ�늙C���Ʒ�����ϵ�y(t��ng)������
������������(sh��)�ؙC�����܉�����ŷ�늙C�D�ٵĿ��ƾ��ȡ�
[0010] ���Q�������g���}�����l(f��)����ʩ�����õ�һ�����g�����ǣ�
�ṩһ�N�ŷ�늙C
���Ʒ������������²��E���ŷ�늙C�������@ȡ����ָ��ֵ�����Д����ָ��ֵ���ٷ�����
���п���ָ��ֵ�����ŷ�늙C���D���D�٣�����������(j��)����ָ��ֵ���ٷ����IJ�ͬ�x��
ͬ�ĵ�һӳ���Pϵ��
����(j��)��һӳ���PϵӋ��@�Ì�������ָ��ֵ��ģ�M��ָ��ֵ������ģ
�M��ָ��ֵ�l(f��)�͵��ŷ�늙C��������һӳ���Pϵ�����ָ��ֵ�cģ�M��ָ��ֵһһ����

|
�YӍ���������
�Ԓ��18801063276
qq̖��928221169
�Ԍ�id:�r����Ⱥ66
�Ԍ���䁣�http://zgbjdj.com/news2.asp?id=9440 |
�YӍ��������
�Ԓ��13521040277
qq̖��2539844470
�Ԍ�id:�r����Ⱥ888
�Ԍ���䁣�http://www.taisu.net.cn/bbs_read.asp?id=4220
|
|



