���ಽ�M늙Cԭ��D
�����Ƚ�Bԓ���M늙C�Ĺ���ԭ����Ȼ���B����������ܛ��Ӳ���OӋ��
����1. ���M늙C�Ĺ���ԭ��
����ԓ���M늙C��һ���ಽ�M늙C�����ÆΘO��ֱ���Դ��늡�ֻҪ�����M늙C�ĸ����@�M�����m�ĕr��ͨ늣�����ʹ���M늙C���M�D�ӡ��D1��ԓ���෴��ʽ���M늙C����ԭ��ʾ��D��
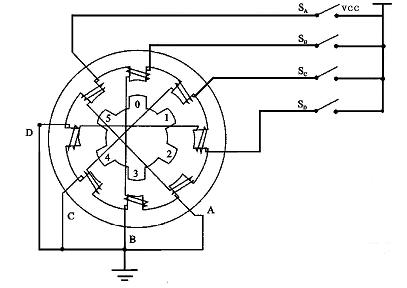
�D1 ���ಽ�M늙C���Mʾ��D
�����_ʼ�r���_�PSB��ͨ�Դ��SA��SC��SD���_��B��ŘO���D��0��3̖�X���R��ͬ�r���D�ӵ�1��4̖�X�ͺ�C��D��
�@�M�ŘO�a���e�X��2��5̖�X�ͺ�D��A���@�M�ŘO�a���e�X��
�������_�PSC��ͨ�Դ��SB��SA��SD���_�r������C���@�M�Ĵ�������1��4̖�X֮�g�����������ã�ʹ�D���D�ӣ�1��4̖�X��C���@�M�ĴŘO���R����0��3̖�X��A��B���@�M�a���e�X��2��5̖�X�ͺ�A��D���@�M�ŘO�a���e�X��������ƣ�A��B��C��D�����@�M݆����늣��t�D�ӕ�����A��B��C��D�����D�ӡ�
�������ಽ�M늙C����ͨ����IJ�ͬ���ɷ֞�����ġ��p���ġ��������N������ʽ���������c�p���ĵIJ������ȣ��������ĵ��D������С�����Ĺ�����ʽ�IJ�����dž������c�p���ĵ�һ�룬��ˣ����Ĺ�����ʽ�ȿ��Ա����^�ߵ��D�������ֿ�����߿��ƾ��ȡ�
���������ġ��p�����c���Ĺ�����ʽ���Դͨ늕r���c���ηքe��D2.a��b��c��ʾ��

a. ������ b. �p���� c����
�D2.���M늙C�����r���ΈD
����2.����AT89C2051�IJ��M늙C����ϵ�y�·ԭ��
�������M늙C����ϵ�y�·ԭ����D3��
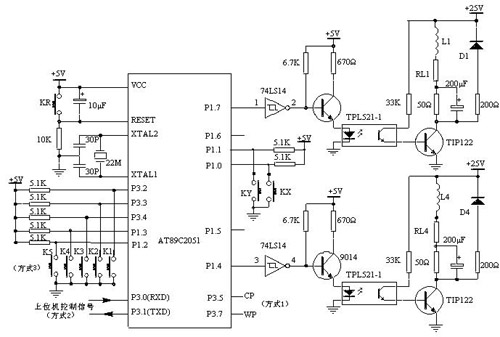
�D3 ���M늙C����ϵ�y�·ԭ��D
����AT89C2051�������}�_��P1�ڵ�P1.4~P1.7ݔ������74LS14������M��9014����9014�Ŵ����ƹ���_�P����늸��x���ɹ��ʹ�TIP122���}�_��̖�M��늉�������Ŵ��Ӳ��M늙C�ĸ����@�M��ʹ���M늙C�S����ͬ���}�_��̖�քe�����D�����D�����١��p�ٺ�ֹͣ�Ȅ������D��L1�鲽�M늙C��һ���@�M��AT89C2051�x���l��22MHz�ľ����x���^�߾����Ŀ���Ǟ����ڷ�ʽ2�±M���pСAT89C2051����λ�C�}�_��̖���ڵ�Ӱ푡�
�����D3�е�RL1~RL4���@�M���裬50�������һ�����裬���������ã�Ҳ��һ�����ƻ�·�r�g������Ԫ����D1~D4���m�����O�ܣ�ʹ늙C�@�M�a���ķ�늄ӄ�ͨ�^�m�����O�ܣ�D1~D4����˥�p�����Ķ����o�˹��ʹ�TIP122���ܓp�ġ�
|



