���g�I��
[0001] �����������漰һ�N�����ŷ�ϵ�y���ƣ��܉��ھ��˷�늙C�_�ӵĿ���ϵ�y��
�������g
[0002] �ڹ��I�ϣ��S�����ƾ��ȵ�Ҫ�����ŷ��Ŀ��Ƴɞ�������������߽����ŷ��
�C�ľ��ȣ����N���͵Ŀ����㷨����ӿ�F��Ŀǰ�����˿˷�ؓ�d��ģ�ͅ����Ĵ�׃����
�Ǿ��Ե�Ӱ푣��˷���늙C���ٕr���F�����ЬF���ڂ��yPID �㷨�Ļ��A�ϣ����F��ģ��
���ơ��W�j����ģ׃�Y�����ơ����m�����Ƶȵȡ��x��Ŀ���оƬ��DSP��FPGA ϵ�С��\
�гɱ��^�ߡ�
[0003] �����@Щ�㷨�����ڂ��y���ƵĻ��A�ϸ����@Щ�����㷨���и��Ե�ȱ�ݡ�ģ��
�����㷨���Ȳ��ߣ��W�j�W��Ӗ���ĕr�g�^�L���y���ھ����ƣ���ģ�������M�뻬�ӑB
����F����Ҳ�����ڻ����渽�����lӡ����m�������nj���׃���^��ą����y�Եõ�
�õĿ���Ч������Щ�㷨߀�ǃH���ڷ��棬����ھ����R���M�ĕr�g�L���y���ھ����ơ���
���ٿ��ƕr��늙C�����F���ЬF�����ЬF���o늙C����һ���ēp�ģ����ƾ��ȸ��y��
���C��
�������̓���
[0004] ���������͵�Ŀ�������ṩһ�N�����ŷ�늙C�ٶȿ���ϵ�y��ԓ����ϵ�y�Y����
�f��ʹ��Ч���^�á�
[0005] ���������͞��ˌ��F����Ŀ�ģ����õļ��g��Q�����ǣ�
[0006] �����ŷ�늙C�ٶȿ���ϵ�y�����������γ��]�h�B�ӵ�늙C�����a�������������
���������������վ��a������̖��֮��ݔ��������̖��������������������̖�Ŵ��
ݔ����늙C��
[0007] �Mһ��������������������̖��STM32F103RBT6 �Ć�Ƭ�C��
[0008] �Mһ������������������PID ����ģ�K��CMAC ����ģ�K��PI ����ģ�K����׃ģ�K������PID ����ģ�K��CMAC ����ģ�K�ಢ��֮�������B��PI ����ģ�K����׃ģ�K��
[0009] ���������͵�����Ч����
[0010] �˷N�����ŷ�늙C�ٶȿ���ϵ�y���ɿ����^�ߣ�����ϵ�y�^�麆�Σ����ھS�o���w
�eС�����ڲ�ͬ�Ŀ��ƾ���Ҫ�ɾ����x��r犅����M�п��ƣ������`�ϵ�y�OӋ�^��
���Σ������˾S�o�ɱ�������STM32F103RBT6 ��Ƭ�C�Y��ģ��CMAC �㷨���F��PID ��
�������܉�˷�PID �ą��������O������������ɔ_����Ч�����늙C�Ŀ������ܡ�����
STM32F103RBT6 ��������оƬ������Ĺ���С���\���ٶȿ죬�ɱ��^�͡�
���D�f��
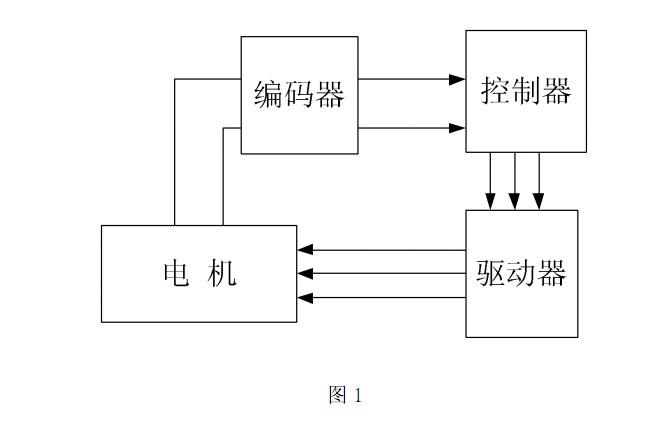
[0011] �D1 �ǽ����ŷ�늙C�ٶȿ���ϵ�yӲ���B�ӈD��
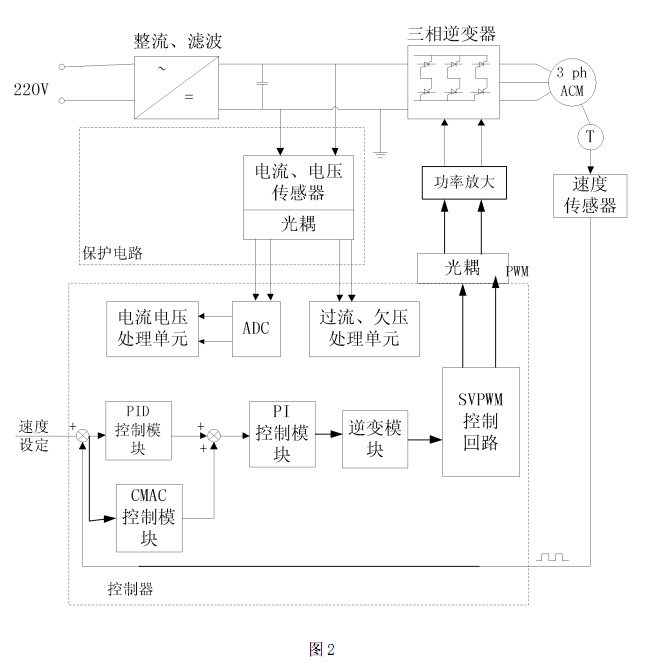
[0012] �D2 �ǽ����ŷ�늙C�ٶȿ���ϵ�y�Ŀ�D��
���w��ʩ��ʽ
[0013] ����Y�ϸ��D�������������M��Ԕ���f����
[0014] �Y�ψD1���D2�������ŷ�늙C�ٶȿ���ϵ�y�����������γ��]�h�B�ӵ�늙C�����a
���������������������������վ��a������̖��֮��ݔ��������̖����������������
����̖�Ŵ��ݔ����늙C������������������̖��STM32F103RBT6 �Ć�Ƭ�C������������
PID ����ģ�K��CMAC ����ģ�K��PI ����ģ�K����׃ģ�K������PID ����ģ�K��CMAC ����ģ
�K�ಢ��֮�������B��PI ����ģ�K����׃ģ�K��
[0015] ��D2 ��ʾ���Դݔ����220V ����늣������·����׃�������������·�͞V����
�ȽM�ɡ�׃�����Ĵ�С�x�����늙C���ʵĴ�С�ɸ�׃�������·�x�����ȫ���������V
�����x��3300uF ����ݣ�����·��ͨ���l�����á�������׃���x�õ�MOSIRF540��ԓԪ��
�����****ֵ30A���͉�ֵ��100V������6 ��MOSIRF540���������_�P���ɿ�����PWM ݔ����
��̖���Կ��ơ�
[0016] �ڱ��o�·����Ҫ���x�����������քe�����������ACS712ELC-20A �����
����������ԓ����������ǻ��ڻ���Ч���ľ�����������������~�Ƶ����·��������Ƭ
�ı��棬5.0 ���؆��Դ������66 ��185mVA ݔ���`���ȣ�ݔ��늉��c������ֱ������ɱ�
���������������̖��ݔ�������D�Q��0-3.3V ֮�g�����^STM32F103RBT6 �Ȳ���12 λAD�D�Q��������3.3 ��늣�������������ݔ�룬�x��AD ��·ͨ����
[0017] 늉��������x���ģ�K�܉���늉��M�Мy�����x�õ���̖��SPT204A��ݔ�뷶
����50-1000V��ݔ����0.05-8V (�\��ݔ��)��ԓ늉��������������һ��������裬ʹ�
���ڻ�����Ҏ���ķ����ȣ��������OP07 �\���·��ʹ�Æ��Դ��늣��Դ��15V�����˺���оƬ늉��������������M���·�M������׃�Q���D�Q��0-3.3V ���·��
[0018] �x��Ŀ�������ݔ����SVPWM�������gʸ�������㷨����ݔ����ͨ�^
STM32F103RBT6 �Ȳ���PWM ݔ����̖��������ʷŴ���֮�g���Ϲ��6N137��5V ��늣��@��
һ���D�Q���ʵ�10M �Ĺ�늸��xоƬ��
[0019] 늙C�ٶ���ͨ�^��늾��a���y�������a���������ͣ�1000 ����ͨ�^��늸��x���M��
����оƬ���x�õ���Ӌ���������M�Мy�٣�ʹ��оƬ�IJ��@���ܡ�
[0020] ����ٶ���ͨ�^����������M��AD �D�Q�������M������������
[0021] ����늄әC��ģ�K�OӋ����PWM ݔ�����^��������x�ţ�����̖�Ŵ���
�IRF540 ���ɡ�
[0022] ���ڿ��������f��ʹ�õ����p�]�h���Ʒ�������h���ٶȭh���ȭh������h����h
��ݔ����̖���ٶȲ���̖�����~���ٶ��c���y��늙C�ٶ�֮����^�������㷨�\�㣬�M��
ݔ����ԓݔ����̖������h��ݔ����̖�����ݔ����̖���M�Кwһ��̎��������hͬ�ӽ��^�������㷨�\�㣬�oһ��ݔ����ݔ����̖���^��׃�Q��������gʸ��׃�Qݔ����
[0023] �˷N�����ŷ�늙C�ٶȿ���ϵ�y���ɿ����^�ߣ�����ϵ�y�^�麆�Σ����ھS�o���w
�eС�����ڲ�ͬ�Ŀ��ƾ���Ҫ�ɾ����x��r犅����M�п��ƣ������`�ϵ�y�OӋ�^
�麆�Σ������˾S�o�ɱ�������STM32F103RBT6 ��Ƭ�C�Y��ģ��CMAC �㷨���F��PID ��
�������܉�˷�PID �ą��������O������������ɔ_����Ч�����늙C�Ŀ������ܡ�����
STM32F103RBT6 ��������оƬ������Ĺ���С���\���ٶȿ죬�ɱ��^�͡�
[0024] ��Ȼ�������f�������nj����������͵����ƣ�����������Ҳ�����H���������e����
�����g�I��ļ��g�ˆT�ڱ��������͵Č��|��������������׃�������͡����ӻ���Q��Ҳ��
���ڱ��������͵ı��o������
|
�YӍ���������
�Ԓ��18801063276
qq̖��928221169
�Ԍ�id:�r����Ⱥ66
�Ԍ���䁣�http://zgbjdj.com/news2.asp?id=9440 |
�YӍ��������
�Ԓ��13521040277
qq̖��2539844470
�Ԍ�id:�r����Ⱥ888
�Ԍ���䁣�http://www.taisu.net.cn/bbs_read.asp?id=4220
| | 

