���M늙C�nj���}�_��̖�D׃���λ�ƻ�λ�Ƶ��_�h����Ԫ���M늙C�����ڷdz��d����r�£�늙C���D�١�ֹͣ��λ��ֻȡ�Q���}�_��̖���l�ʺ��}�_����������ؓ�d׃����Ӱ푣������M�������յ�һ���}�_��̖�������Ӳ��M늙C���O���ķ����D��һ���̶��ĽǶȣ��Q�顰����ǡ����������D���Թ̶��ĽǶ�һ��һ���\�еġ�����ͨ�^�����}�_���������ƽ�λ�������Ķ��_���ʴ_��λ��Ŀ�ģ�ͬ�r����ͨ�^�����}�_�l�ʁ�����늙C�D�ӵ��ٶȺͼ��ٶȣ��Ķ��_���{�ٵ�Ŀ�ġ� 89C51����Сϵ�y�� 
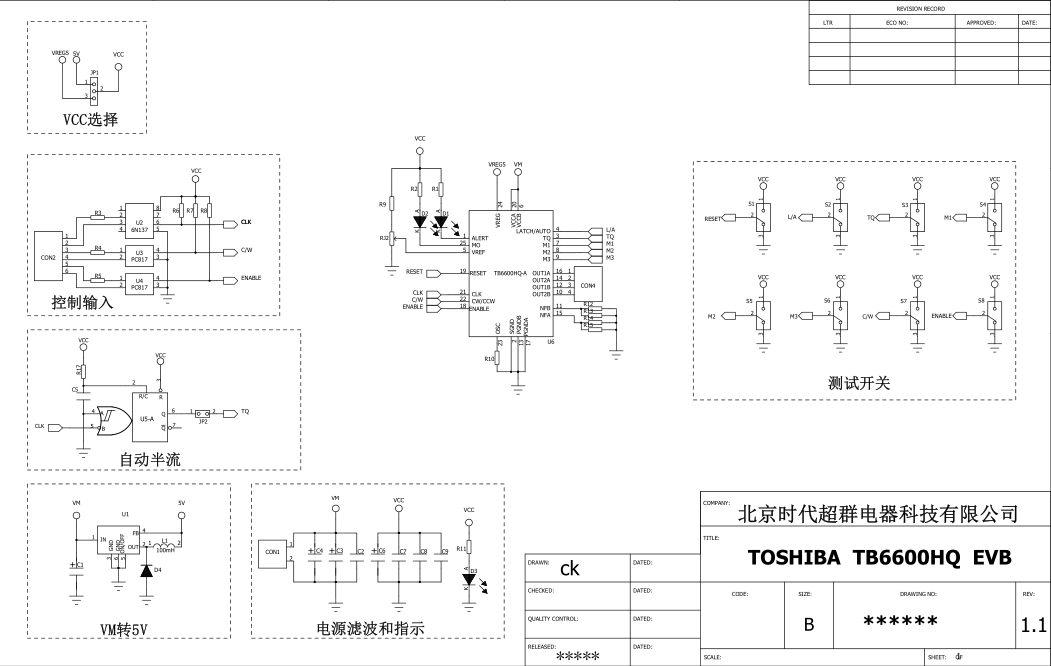
��鲽�M늙C�Ŀ�����ͨ�^�}�_��̖�����Ƶģ�����}�_��̖�D׃���λ�ƻ�λ�Ƶ��_�h����Ԫ�����������Ӯa���@���}�_��̖�ͮa�����ӵ���̖��늙C���Ƶ��P�I���Æ�Ƭ�C���a���@���}�_��̖��ͨ�^��Ƭ�C��P1��ݔ���}�_��̖�� TB6600ԭ��D��
��䛣�������
*********************************************** * �yԇ�f�� *1��MCU:STC89C52RC *2���yԇ�l��:12Mhz *2�������Z��:C51 *2�����g�h��:Keil C *2������:ȫ�����D��ȫ�ٷ��D��ֹͣ���{���\�� *************************************************************** <reg52.h> //TB6560ݔ����ƶ˶��x sbit CLK = P1^0; sbit ENA = P1^1; sbit DIR = P1^2; sbit CW = P3^0; //���D�\�а��I sbit STOP = P3^1; //ֹͣ�\�а��I sbit CCW = P3^2; //���D�\�а��I sbit ADJ1 = P3^3; //�{���\�а��I sbit ADJ2 = P3^4; //�{���\�а��I bit Run_Status; //�\�Р�Bλ��־�� //=0��ʾ늙C��ֹͣ��B�������I���D�����D���� //=1��ʾ늙C���\�Р�B����֧�������D���I��ֻ����ֹͣ����ֹ���ГQ�� ����������^�� unsigned char Run_Dir; //늙C�\�з��� #define F_DIR 0 //���D #define B_DIR 1 //���D unsigned int CYCLE; //����׃�� /************************************************************** ********************************** ** �������Q: void Delay(unsigned int cnt) ** ��������: ���ε��ӕr���� ** ݔ ����: cnt:0-65535֮�g���������� ** ݔ ����: �o *************************************************************** **********************************/ void Delay(unsigned int cnt) { while(--cnt); } /************************************************************** ********************************** ** �������Q: void main(void) ** ��������: ������ ** ݔ ����: �o ** ݔ ����: �o *************************************************************** **********************************/ void main(void) { Run_Status=0; //=0��ʾ늙C��ֹͣ��B�������I���D�����D���� CLK = 0; ENA = 0; while(1) { if(!STOP) //�κΕr��ֹͣ�I��늙Cֹͣ�\�� { Delay(1000); //�ӕrȥ���� if(!STOP) { Run_Status=0; //늙C����ֹͣ�Ġ�B��־ CLK = 0; ENA = 0; TR0=0; } } if(!CW&&!Run_Status) //�����D�Iͬ�r늙C���������\�Еr��늙C���D�\ �� { Delay(1000); //�����ӕrȥ���� if(!CW&&!Run_Status) { Run_Status=1; //늙C�����\�еĠ�B��־ DIR = 0; //���D ENA = 1; CYCLE=2500; //�}�_�l�� ���r���O�� 10ms in 12M crystal ��100Hz TMOD |=0x01; TH0=(65536-CYCLE)/256; TL0=(65536-CYCLE)%256; IE= 0x82; //���_�Д� TR0=1; Run_Dir=F_DIR; //늙C�\�з������D } } if(!CCW&&!Run_Status) //�����D�Iͬ�r늙C���������\�Еr��늙C���D �\�� { Delay(1000); //�ӕrȥ���� if(!CCW&&!Run_Status) { Run_Status=1; //늙C�����\�еĠ�B��־ DIR = 1; //���D ENA = 1; CYCLE=2500; //�}�_�l�� ���r���O�� 10ms in 12M crystal ��100Hz TMOD |=0x01; TH0=(65536-CYCLE)/256; TL0=(65536-CYCLE)%256; IE= 0x82; //���_�Д� TR0=1; Run_Dir=B_DIR; //늙C�\�з����D } } if(!ADJ1) { Delay(5000); //�ӕrȥ���� if(!ADJ1) { if(CYCLE<20000) CYCLE+=2000; else CYCLE=1000; Run_Status=1; TR0=1; } } // if(!ADJ2) // { // Delay(5000); //�ӕrȥ���� // if(!ADJ2) // { // if(CYCLE>2000) CYCLE-=2000; // Run_Status=1; // TR0=1; // } // } } } /************************************************************* ********************************** ** �������Q: Timer0_ISR ** ��������: ���r��0�Д�̎������ ** ݔ ����: �o ** ݔ ����: �o *************************************************************** **********************************/ void Timer0_ISR(void) interrupt 1 using 1 { TH0=(65536-CYCLE)/256; TL0=(65536-CYCLE)%256; CLK = ~CLK; }
����Ҫ LV8731 �� LV8728 �� LV8729 �� LV8727 �� LV8726 ��STK682�� TB67S109 ��TB6600 ��TB6560 ���M늙C���� оƬ�� �������� �� ���g ���}�S�r���Խ��� ϵ�Ԓ��ꐹ� 18010107259 15311412871 Q��2539844470
|


