��ժҪ�� ϵ�y�U�������M늙C�]�h����ϵ�y�ă��c���o���ˎN���͵��]�h����ϵ�y��������˲��M늄әC�߾��ȶ�λϵ�y���OӋ˼�롣 ���� �~�����M늄әC�]�hϵ�y���߾��ȶ�λ l���� ���M늄әC�ǙC�һ�w���aƷ�е��P�IԪ��֮һ����һ�N�������õĔ��ֻ�����Ԫ�������܉�늵��}�_��̖�D�Q�������Ľ�λ�ƣ���һ�N�xɢ���Ԅӻ�����Ԫ�����S��Ӌ��C����ϵ�y�İlչ�����M늄әC�V��������ͬ��ϵ�y��ֱ������λϵ�y���cλϵ�y���B�m܉�E����ϵ�y�Լ������Ԅӻ�ϵ�y�У��Ǹ߿Ƽ��lչ��һ����Ҫ�h���� 2���M늄әC�]�hϵ�y�c�_�hϵ�y���^[1-5] ���M늄әC����Ҫ���c֮һ���m���_�h���ơ����_�h�����£����M늄әC�ܾ����趨�r�g�g�����}�_���������ƣ�����ϵ�y�Пo�跴������������������Ӿ�·���@�N��·���к��Ρ��M�õ͵����c��ʹ���M늄әC���_�h����ϵ�y���ԏV���đ��á� ���ǣ����M늄әC���_�h���Ɵo�����ⲽ�M늄әC���������е�ȱ�c����������ʎ��ʧ�����y�Ԍ��F���١���һ���棬�_�h���ƵIJ��M늄әCϵ�y�ľ���Ҫ���ڷּ��Ǻ����y�ģ��䶨λ���ȱ��^�͡���ˣ��ھ��Ⱥͷ����Ԙ˜�Ҫ����^�ߵ�ϵ�y�У��ͱ�횹����]�h����ϵ�y�� ���M늄әC���]�h�����Dz���λ�÷����ͣ����ٶȷ������_���c�D��λ�����m������λ�D�Q���ɴ����M���M늄әC�����ܡ� ���]�h���ƵIJ��M늄әCϵ�y�У�����ھ��нo�����_���¸�ۙ�ͷ����r���U�����ٶȷ���������ڽo���ٶ�����߸�ۙ�Ͷ�λ���ȣ���ɵõ��O���ٶ�ָ�˺͘O����ָ�ˡ����M늄әC���]�h���������c�_�h����������ȣ����������c�� a���S��ݔ���D�ص����ӣ����ߵ��ٶȾ��ԷǾ�����ʽ�½������ǣ��]�h��������˾��l���ԡ� b���]�h�����£�ݔ�����ʣ��D������������ߣ�ԭ���ǣ��]�h�£�늙C����D�Q�����D��λ����Ϣ����A�ģ����ֵ�Q����늙Cؓ�d����ˣ���ʹ�ڵ��ٶȷ����ȣ����Ҳ�܉����D�Q���D�ء� c���]�h�����£�Ч��һ�D��������ߡ� d�������]�h���ƣ��ɵõ����_�h���Ƹ��ߵ��\���ٶȣ������������⻬���D�١� e.�����]�h���ƣ����M늄әC���Ԅӵء���Ч�ر����ٺ͜p�١� f���]�h���������_�h�����ڿ����Է�����ߵĶ����u�r���ɽ������^������ͨ�^ij��·���g���ĕr�g�ó��� 
ʽ��n-���M늄әC�D�Q�Ĕ�(n>n) g�������]�h�ӣ�Ч�ʿ�����7.8����ݔ�����ʿ�����3.3�����ٶȿ�����3.6���� �]�h�ӵIJ��M늄әC�����������з���������_�h�ӵIJ��M늄әC�����M늄әC�]�h�Ӿ��в��M늄әC�_�h�Ӻ�ֱ���oˢ�ŷ�늙C�ă��c����ˣ��ڿɿ���Ҫ��ܸߵ�λ�ÿ���ϵ�y�У��]�h���ƵIJ��M늄әC���@�ÏV�����á� 3���a����ʽ�IJ��M늄әC頭h����ϵ�y ���M늄әC���]�h���������Dz��þ��a������ʽ���D1����ԭ��ʾ��D����ʼ��B��ϵ�y��һ�����༤�Ŷ��oֹ���_ʼ�������Ȱ�Ŀ��λ������p��Ӌ������Ȼ�����ӡ��}�_��̖�ӵ����Ɔ�Ԫ�ϣ����Ɔ�Ԫ�ڡ����ӡ��}�_�������£������Ѳ��M������������l������ʹ����׃��һ�Σ����m���}�_�t�ɾ��a���b�îa�������a��ÿ�a��һ���}�_���͌���Ӌ�����p1��������p��Ӌ����ӛ䛵��nj��H���D��λ�á����p��Ӌ������Ӌ���p����r���l��һ��ֹͣ��̖�����Ɔ�Ԫ����ֹ�Ժ�IJ��M���ϵ�yֹͣ������ 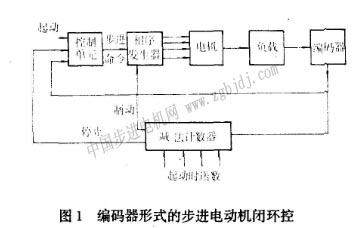 ���ڵͷֱ��ʵIJ��M늄әC��ͨ��ʹ��һ���_�˲۵ĈA�P��늂��������鷴�����a���ĽM�ϼ�����D2��ʾ���ۿڵĔ�Ŀ����늙Cÿ�D���ߵIJ����� 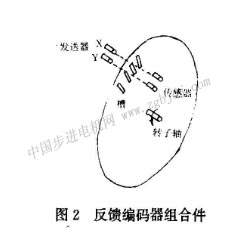 ���ڸ߷ֱ��ʵIJ��M�ۿ�C���t����ø߷ֱ��ʵ��������a���������D׃�����������a�����Б�ͬ�����������a���ȡ� ���ڷ������a���r���F�����Ҟ��˰Ѿ��a�����ŵ����M늄әC���S�ϣ�Ҫ��ϵ�y���и�����w�e���@����ȱ�������˾��a����ʽ�IJ��M늄әC�]�h����ϵ�y�đ��á� 4���Ιz�y��ʽ�IJ��M늄әC�]�h����ϵ�y ���Ιz�y��ʽ�IJ��M늄әC�]�h����ϵ�y��ԭ����ͨ�^�����M늄әC��������@�M��늄ݣ����@�M��늄��������������ęz�y���g�ӵõ��D��λ����Ϣ�����������Ɔ�Ԫ�a�������}�_�����Ʋ��M늄әC�\�ӡ� 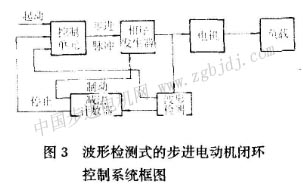 �D3����ԭ��D�����Ιz�y�����ɺ��ε���Ӿ�·���ɣ��r����ˣ������Ҫ����ֱ�Ӱ��b�ڿ�����߉��·�У����M늄әC���踽�ӵęCе�B�ӡ� 4.1��������z�y�IJ��M늄әC�]�h����ϵ�y ������z�y�IJ��M늄әC�]�h�����ǻ���ijЩ����ʽ���M늄әC���������һ�����ʷ����ȳ��F���Ļ�ؓ�ĘOֵ�@һ�����M�еġ���ϵ�y�ӳ�ʼ�����}�_��늙C���ӣ�����������F�Oֵ��˲�g������z�y��·˲�r�a��һ���}�_���߶��r��̖�������o���Ɔ�Ԫ��������m�}�_�����F�˲��M늄әC���]�h���ơ�ֵ��ע����ǣ�늙C��ͨ������ͽ�ֹ����������ܳ��F���ɂ����壬������һ�N��B���M�Йz�y���ɸ���늙C�Č��H�\�д_������D4��ʾ������z�y��ͨ�^�������·�в���һ����֪��ֵ��С��裬�y�����ͨ�^�r��늉����F������z�y��·һ�������ģ�M�ַ���������di/dt���^��ֵ��ʾ���z�yԭ��D��D5��ʾ�� 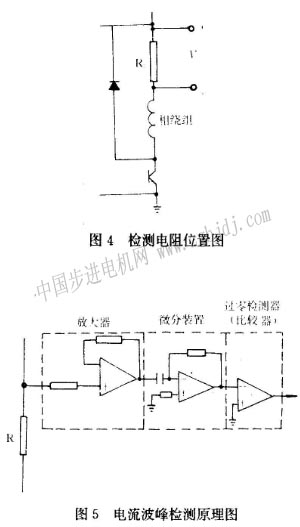
4.2���÷�늄ݙz�y�IJ��M늄әC�]�h����ϵ�y ���Ų��M늄әC���÷�늄ݙz�y���]�h����ϵ�y�����䃞Խ�ԡ�һ�_���Ų��M늄әC�Č��|���v������һ�_��������ͬ��늄әC�����ÈD6��ʾ��ģ�������� 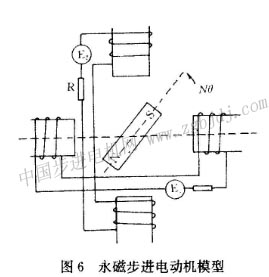 ���@�M��늉����̿ɱ�ʾ�ɣ�  ʽ��l������·늸� r������·��� ii��������� �ȡ����D�ӽ�λ�� n�����D���X�� k�����D�س��� ei�������ڵ�i���ϵ�늉� ��늉������-ksinn�ȣ��Ⱥ�kcosn��.��������늙C���D�r���@�M�Юa���ķ�늄ݡ��D��λ����̖�w�F�ڷ�늄ݵ���λ��(sinn�Ⱥ�cosn��)���D�ӵ��ٶȿ��ɷ�늄ݵķ�ֵ�ó��������늄ݵ��l��Ӌ�㡣��ˣ��ķ�늄��У��ɵõ����Ŀ���늙C���ܵ��Ų��M늄әC���]�h����ϵ�y̖�� ���ڲ��M늄әC�@�M�еķ�늄ݷ�ӳ���D�ӵĽ�λ�úͽ��ٶȣ���ˣ����ɷ������P�I�����µõ���늄ݲ��Σ��Ա㌦���M�Йz�y���a�����m�}�_���جF��늄ݲ��εķ����ЃɷN�� a���o����Ȧ�� �o����Ȧ����ԭ����D7��ʾ���@���Dʾ���ăH��1��Ļ�·���z�y��Ȧ���@�ڶ��ӘO�ϣ��z�y��Ȧ�Ȯa����늉��Ɍ��ɣ� 
׃�����ij�����Ȧ�c�����@�M�മ���μ���Ȧ�ĸБ�늉��Ɍ��ɣ�  �OӋ��ֵ��miֵʹ��M���Pϵʽnl=m1���t늉�v1�Ɍ��ɣ�  �@��ζ��1���еķ�늄ݿ��ڃɂ����B��Ȧ�ăɶ��جF��2���еķ�늄ݿ�ͬ����v2 =nkcosn�ȣ�����ʽ�z�y�� b��߉���淨 ߉���淨��ͨ�^һ���\��Ŵ�����·�جF�@�M�еķ�늄ݣ�����ʽ(1)���Եõ���늄ݵı��_ʽ��  �D8��ʾ�ľ�·�ɷ���ʽ(9)��߅��3헣���ݔ�����鷴늄�vim=ksinn�ȡ��ȡ� 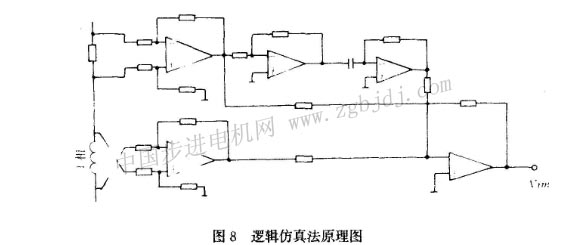 �����o����Ȧ����߉���淨�õ���늄�uim�ͿɌ���늄ݲ����M�Йz�y����늄ݲ�����һ���Ҳ��������^����^�������������^���c�M�Йz�y���a���}�_�����������Ɔ� Ԫ��������m�}�_���Ϳ��γ��]�h���ơ� �@�N��늄ݙz�y��ʽ���]�h���ƣ��ڵ����\�Еr�Ǻ��y�ģ���ˣ��ڌ��H�\�Еr����Ҫ�_���]�h�Y��ʹ�á� 4.3���÷�늄�����z�y�IJ��M늄әC�]�h����ϵ�y �z�y���@�M��늄��������������Ķ��M���]�h���ƣ���һ�N��·���^���ε��]�h ���Ʒ������Oi��늙Cһ���@�M�еČ��H�����is����D�r�@�M�е������id����ߵIJ�ֵ�����ǃH���ڷ�늄ݕr���@�M�е������һ��Q����늄������ 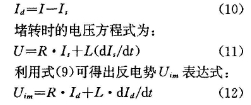
�ڃH���]�@�M��ӄ��늉������β����Ļ����ɷ��ǣ�id���Ԍ��� 
ʽ�Цء����D�ǽ��ٶ�(��=��) �]�h��������ķ����}�_��ͨ�^id�����^��z�y���F.�����ֵ��̖id�t���ÈD9��ʾ�·�a�� 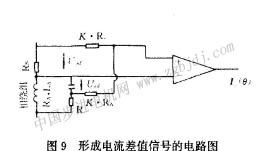
�oՓ�Dz�ȡ���a����ʽ,߀�Dz�ȡ���Ιz�y��ʽ,Ҫ�����]�h�z�y,�γɺ��m�}�_.����,Ҫ�����]�hϵ�y,�Ά����γɺ��m�}�_߀�Dz��^��,߀��������_�ؑ����D�Q�ǣ����x���γəz�y�}�_��λ�á� 5�D�Q�ǵ��x�� ͨ���D�Q��С�r���a���ķ��B�D���^�ߣ����Ҳ�ͬ�\���l���£��܉�a��****������С�����B�D�ص��D�Q���Dz�һ�ӵġ� �O��k��ķ���ƽ��λ�Þ鿿������ƽ��λ�Þ��棬���λ�Þ��k���t�D�Q�Ǧ�=��kon -��k���دB�Ǧ�=��koffһ��k+lon����ֵһ���r������=�r���܉�a���Oֵƽ���D�ص��D�Q�Ǧ����ɱ�ʾ�ɣ� 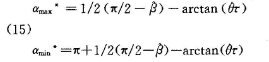
�������¾������r���܉�a���Oֵ��ʾ�ɣ� 
һ�_���M늄әC�ĵ����\���^�̣��������١����١��p�������\�Ӆ^�Ρ��@Щ�\�Ӡ�B�Č��F������ͨ�^�D�Q�D�ǵĸ�׃����ɵģ���ʽ(15)��ʽ(16)���ɿ�����ֻҪͨ�^�ٶȷ������m�r��׃�D�Q�ǣ������_�������\���^�̵��D��****���ƣ���ߎ��d���������⣬��ֵ���f����һ�c�ǣ��\���^�̵��D��****�����c�\���^�̵ĕr�g****������һ�µġ� �]�hϵ�y�У���׃�D�Q�ǵķ������}�_ע�뷨�͕r�g���t��2�N�� ���^�}�_ע�뷨��������늙C��Ҫ���ٻ�p�ٕr�����Ƴ����}�_��м��븽���}�_��ʹ늙C�ēQ�����l����׃���Ķ��_����׃�D�Q�ǵ�Ŀ�ġ� ���^�r�g���t�����ڷ������c���Ɔ�Ԫ֮�g����һ���r�g���t�b�ã�ʹ�������l���Q����̖�c���H�Q��֮�g�a��һ���ĕr�g�g���� ����Щ��r�£�����ʹ����ϵ�y���λ��������x��һ���̶���׃���D�Q�ǡ��@���D�Q�ǵ��x��ȡ�Q��늙Cһؓ�d������Ҫ�����^�ľ��x�����Ŀ��λ���x��ʼλ�Û]�Ўײ�������ؓ�d�T���ܴtϵ�y�����ܼ��ٵ����١��@�r��Ҫ���]���ٕr�õ����D�ؑ��tϵ�y�����ܼ��ٵ����١��@�r��Ҫ���]���ٕr�õ����D�ؑ�����ˣ����x����D�Q�ǡ�ؓ�dλ�ƴ�r���t��r�෴������_��****�ٶ������ĕr�g���@��****�ٶȹ��������ĕr�g�٣���ˣ����x��С�D�Q�ǣ����ٕr���D�ؽ��ͣ���ʼ���ٶ�С�����@���ɱ��^�ߵķ��B�����ٶȼ����a���� 6���M늄әC�ĸ߾��ȶ�λϵ�y�O�� ���������ŷ�Ԫ�������ڔ��ֿ���ϵ�y�IJ��M늄әC����λ������һ헻�����Ҫ����һЩ����ĸ߾���ϵ�y���羫�ֶܷȣ����ܼӹ����ܜyԇϵ�y����ͨ���M늄әC�ķֱ��ʼ����ȶ��@�ò���Ҫ�_���뼉�Ķ�λ���ȡ���횲��þ��ȸߵĜy��Ԫ�����Б�ͬ��������λ�Â����������]�hϵ�y���������ԴҲ��횲��ü��ֵ���ʽ���D10���@�N�߾��ȶ�λϵ�y��ԭ����D�� 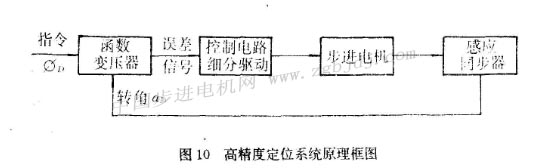 ��ָ����Ҫ����ɵĽǶ������A�ý����뺯��׃������ʹ��ԭ�˳��^̎���A��λ�ã��Б�ͬ��������z�yԪ�����Ƕ���̖��d�͵�����׃�������t����׃������ݔ���飺 
ʽ��r-悶���� x-�����є��颤f����׃�������є��ĸп� p-늄әC�D���X�� �����z�y�ĽǶ���̖�c�A�ýDz��ȕr���`����̖e�����㣬ݔ������·�Ƅӈ��ЙC����ֱ���`����㣬��ɽǶȵľ�������������׃�����A�ýǵĸ�׃������^λ�õĸ�׃��ͨ�^����_�P���ƌ��F�ġ� �߾��ȶ�λϵ�y���øБ�ͬ��������Ƕșz�yԪ����Ŀǰ���Б�ͬ�����Ĝy�Ǿ��ȿ��_����僞�ڡ�1���ij̶ȡ� Ҫ��ɸ߾��ȶ�λϵ�y������߀��䏛Q��һ���P�I�Ǽ������·���������·�кܶ���ʽ�������Ҳ��ɘ��ӷ�ʽ���A�ݲ��ӸFʽ�������}�_�����·��ģ�M�Դ�ӷ�ʽ�ȡ�
|


