����҂�Մ���\��ϵ�y(t��ng)�ľ��ȣ��͕��l(f��)�F(xi��n)�S�����ض�������Ӱ푡����]ϵ�y(t��ng)�ľ��ȕr�����̎����֪��������M늙C��������������f(xi��)�{(di��o)��ρ��@��������\�о��ȡ�
����һ����Ҋ���`�^(q��)���ǰ�ϵ�y(t��ng)�ľ����`��ȫ���w�Y��늙C�Ć��}���IJ��M늙C�ĽǶȁ��f����Ҫ�M��һЩ����˜ʣ������Cе�����늚����@�M늸еIJ���������Ҫ���أ�����һЩԭ������Oѥ���D�ӵIJ����ʣ����D���g��϶�IJ������D���X���Pϵ���Լ��D���}�ӵȡ��_�������m(x��)�����@Щ����(sh��)�����Ƿdz����y���¡�
�����҂�֪����늙C�����@�M��늸����������@�M�є�(sh��)��ƽ����ֻҪ����ǡ��?sh��)��@�ƹ�ˇ���ܱ��C��늸��g��һ���ԡ��ܶಽ�M늙C�������ѽ�(j��ng)ʹ���Ԅ��@���O������C�@�Nһ���ԡ���Ȼ���D�Ӵ��Բ���Ҳ���߂����õ�һ���ԏĶ����C늙C����늸е�һ�¡�����һЩҎ(gu��)��ָ�˄t�c�Cе���P��ֻҪ������ʹ�ÿɿ��ġ���Ʒ�|(zh��)�IJ�������(y��u)���Ĺ�ˇ���Ɓ����C���D�Ӿ����ĥ���������ܫ@�ÝM��ľ��ȡ�����lin engineering ��˾��belal azim���f�����ڱ��C�˃����p�O�Բ��M늙C��늸��g���`���ڡ�5percent�ԃ�(n��i)�����0.9�ȵIJ��M늙C��ʹ��64����ģʽ�£���λ�`������_����1.5���֣��������_�Ժ͜ʴ_�ԡ��M�������ϗl�������M늙C�Ϳ�����ȫ�_��ָ��Ҫ��
����ʣ�µ��΄վ�������/���������V���M늙C��ԓ�\�ӵ��ă�������\�ӣ����Ҳ������������������Ȳ��߶�������늙C�ľ��ȡ�һ����������ͨ�^�o늙C�@�M�ṩ�ض��ļ�����������V늙C��Ҫ�\�ж��ق��������M늙C�\��������ģʽ�r������****����鄂���c늙C�ęCе�OӋ���c���Ǻϡ��˕r���D���X������ȫ���R�����@�M�����^�����****���S�����֔�(sh��)�����ӣ����ؽ������pС���˕rԽ��Խ�y�Ա��C��λ�Ĝʴ_�ˡ� 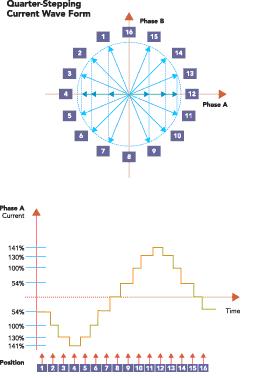
ÿ�_���M늙C�����Լ��ض�������ָ�ˣ��ܶ�ָ�˶��Ǹ���(j��)���H����Ҫ���OӋ�ġ������ʹ���OӋ��늙C����늸������^��֮������OӋ늙C��늸������^С�����˝M�㲻ͬ���\��Ҏ(gu��)�ɣ����M늙C�OӋ���̎���Ҫ�{(di��o)����Ȧ���@�M���OӋ���ԝM����ٶȡ��D�ء����������Լ�늸����P�Ĕ�(sh��)�W��ʽ����ˣ�ͬһ�_����ƥ�䲻ͬ늙C�r�ʬF(xi��n)����ͬ���\�����ܣ�ͬ�ӣ�һ�_늙Cƥ�䲻ͬ�������r�D������Ҳ��ͬ��
�����@����ƽ��(w��n)�\�����ܼ����_��λ����K��Q�����������@����ƽ��(w��n)�\�����ܼ����_��λ����K��Q�����������_��ƥ��늙C����������ǰ�����е��������ǰ�������ݔ������OӋ���Ñ����{(di��o)����Щ��������ͨ�^���{(di��o)�λ����adjustable trim pot����׃ݔ��������Σ���Щ���{(di��o)��(ji��)���棬߀��һЩ����ͨ�^�D���Ñ��������d�ض������ұ���m��늙C���ԡ����{(di��o)�λ�����S�Ñ��ք��{(di��o)������ݔ�������ƥ��늙C���Զ��o���˽�늙C�������ă�(n��i)�����g��Ȼ������ϣ���@��****ƥ�����ܵ��Ñ���f�@Щ��������ȱ�ݡ�
�������͵ļ���ģʽ����2��4��8��16��32��64��128��256��������֔�(sh��)Ҳ����������ˆβ����ȣ������������֔�(sh��)�ȷց���߾��ȣ������磬һ�_0.9�ȵIJ��M늙C�����64���ֵ���ģʽ�����ؽǿ����_��0.014�ȡ���Ȼ������Ҳ��횰��ռ���Ҏ(gu��)���ṩ�o늙C���_�����ֵ��
�����D����4������ģʽ��늙C������gʸ���D�Լ�������S�r�g׃����ʾ��D������ֱ�^�ر�ʾ������ÿ����횽o����늙C������Ĵ�С�ͷ��������ĽǶȁ��f��ݔ���������Ҫ�����Ǽ�����оƬ��������������оƬ���OӋ�Q�����������x�õ�mosfet�������ݡ��·�����������Ĺ̼���ܛ�����Լ���������ɢ�᷽ʽ��Ҳ��Ӱ������ܡ���˼�ʹ�ӿ���оƬ�ܽo��ƽ���Ҿ��_������������Σ���Ȼ���ܱ��C�@��****�ľ��ȡ�
�����@�M���gʾ��D�е�λ��12̎��a���b������˰ٷ�ֵ�ǣ�100��0��������ݔ��100percent������oa�࣬��b�������0percent����늙C�\�ӵ�λ��13�r������׃�ɣ�92��38�����˕r����ݔ���M�����92percent�oa���b��õ�38percent�������@�ӵķ�ʽ��ÿһ�������͕�֪��a���b������ǃɂ�����90�ȵ����Ҳ��� �����\�ӿ���ϵ�y(t��ng)��ƥ�䲽�M늙C��������5�����β��E��
����1. �x����m��늙C�����ڌ��ٶȺ��D�ص�Ҫ��
����2. �_�J늙C���gָ���и���늸�֮�g�`���ڡ�5percent�ԃ�(n��i)��
����3. �x����m��������������ܵ�Ԓ���@������ݔ����������ΈD��
����4. �_�J������������\��ƽ��(w��n)�ԵĹ��ܻ����x헣����{(di��o)��(ji��)�m(x��)��������ȣ����ٻ��߿������˥�p������{(di��o)��������ε��λ����
����5. ����(j��)��������ƥ��늙C늸�����ͨ���f������늸���늙C���������^�ã�������Ҫ�����߂��������ᣨ�����m(x��)��������������m(x��)�����g�����½�������������늸еĿ��ٷ�늡���늸���늙C�������ܺã�����������ṩ�^�͵�������ᣨ�����m(x��)��������ô�@Щ늙C���ʬF(xi��n)�����õĹ������ԣ����������늸�����й���^���Пo���e���������������һЩ늸����еȵ�늙C���f�������x��߂����m(x��)�������������� 
(li��n)ϵ�ˣ����� 18501531992 |


