һ���o(w��)ˢֱ��늄�(d��ng)�C(j��)����Ҫ���g(sh��)��(sh��)��(j��)
(1)늄�(d��ng)�C(j��)����(sh��)km����늄�(d��ng)�C(j��)��һ��(g��)Ʒ�|(zh��)ָ��(bi��o)����λ��n��m��w1��2��(du��)��һ��(g��)�o���w�e��늄�(d��ng)�C(j��)���ԣ�kmֵԽ�ߣ�늄�(d��ng)�C(j��)�Ĺ��ʾ�Խ��
(2)늄�(d��ng)��(sh��)����(sh��)ke��ָ�چ�λ�D(zhu��n)����늘��@�M���Б�(y��ng)�a(ch��n)����늉���ke=ct�զġ�
(3)���س���(sh��)kt��ָ�چ�λ늘���������a(ch��n)����늴��D(zhu��n)�أ��ַQ�������`���ȣ�kt=ct�զ�
(4)늚�r(sh��)�g����(sh��)��eָ��(d��ng)�o늘��@�Mʩ�ӆ�λ�A�Sݔ��늉���늘�����_(d��)��63����(w��n)�B(t��i)ֵ����Ҫ�ĕr(sh��)�g��
(5)��ֵ����l��ָ����B(t��i)(20��)�l���£���10s֮��(n��i)늘��@�M�ĜضȲ����^(gu��)****���Sֵ����r�£�늄�(d��ng)�C(j��)���ܰ�ȫ�a(ch��n)�������ء���(d��ng)Ȼ���a(ch��n)����ֵ���ؕr(sh��)Ҳ����(y��ng)���������w�����S��****ȥ�Ŵń�(d��ng)��(sh��)��
(6)�B�m(x��)���D(zhu��n)����tcsָ���D(zhu��n)�ӱ����D(zhu��n)�͟o(w��)���L(zh��ng)�ĕr(sh��)�g���ڃ�(n��i)늘��@�M�ĜضȲ����^(gu��)****���Sֵ�ėl���£�늄�(d��ng)�C(j��)���ܰ�ȫ�a(ch��n)�������ء��B�m(x��)���D(zhu��n)��������Ҏ(gu��)���İ��b�l���£��簲�b��ʲô�Πô�ߴ����ʲô�����Ƴɵ�ɢ����Ϝy(c��)���õ��Ĕ�(sh��)ֵ�� 
�����o(w��)ˢֱ��늄�(d��ng)�C(j��)�c����ͬ��늄�(d��ng)�C(j��)�ı��^
�o(w��)ˢֱ��늄�(d��ng)�C(j��)����Ӿ�·�c늙C(j��)�ڞ�һ�w�������M(j��n)����Ӽ��g(sh��)���C(j��)���Ƽ��g(sh��)��(y��ng)����늙C(j��)�I(l��ng)���ǵ��͵ęC(j��)�һ�w���a(ch��n)Ʒ�����M(j��n)��늙C(j��)�����Ƽ��g(sh��)�İl(f��)չ���o(w��)ˢֱ��늄�(d��ng)�C(j��)��������ʽ늄�(d��ng)�C(j��)��Ŀǰ�����Ԅ�(d��ng)����ϵ�y(t��ng)���ձ�ʹ�õ�����늄�(d��ng)�C(j��)�Ѓɴ�����o(w��)ˢֱ��늄�(d��ng)�C(j��)������ͬ��늄�(d��ng)�C(j��)���@����ߵ���Ҫ�^(q��)�e�M(j��n)�б��^���Թ�������
1���O(sh��)Ӌ(j��)����
�O(sh��)Ӌ(j��)�o(w��)ˢֱ��늄�(d��ng)�C(j��)�ij��l(f��)�c(di��n)�����b�������w���D(zhu��n)��ȡ����ˢֱ��늄�(d��ng)�C(j��)�Ķ��ӴŘO����ԭֱ��늄�(d��ng)�C(j��)���D(zhu��n)��늘�׃?y��u)鶨�ӣ��D6 13��ʾ��o(w��)ˢֱ��늄�(d��ng)�C(j��)��׃ʾ��D����ˢֱ��늄�(d��ng)�C(j��)�������C(j��)е�Q������ֱ������D(zhu��n)�Q��������β��Ľ�������bdcm�nj��������(��(sh��)�H��Ҳ�����β�)ֱ��ݔ�붨�ӣ����̎����ʡȥ�˙C(j��)е�Q�������ˢ��Ҳ�Q����ӓQ��a(ch��n)���㶨늴��D(zhu��n)�أ�Ҫ��ϵ�y(t��ng)��bdcmݔ��������(du��)�Q���������ͬ�r(sh��)Ҫ��bi)cm��ÿ��Б�(y��ng)늄�(d��ng)��(sh��)�����β������Ҳ�Qbdcm�鷽��늄�(d��ng)�C(j��)�����O(sh��)Ӌ(j��)����ͬ��늄�(d��ng)�C(j��)�ij��l(f��)�c(di��n)��ֱ���������wȡ��늄�(l��)��ͬ��늄�(d��ng)�C(j��)�D(zhu��n)���ϵĄ�(l��)���@�M����ʡȥ��(l��)�ž�Ȧ�����h(hu��n)���ˢ�� 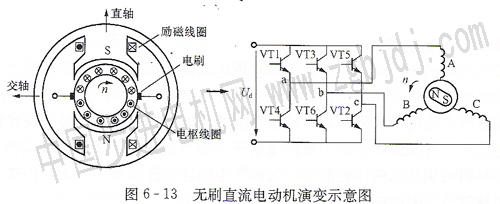
�D6��14��ʾ������ͬ��늄�(d��ng)�C(j��)��׃ʾ��D��pmsm�Ķ����c늄�(l��)��ͬ��늄�(d��ng)�C(j��)������ͬ��Ҫ��ݔ�붨�ӵ������Ȼ���������ҵġ���a(ch��n)���㶨늴��D(zhu��n)�أ�Ҫ��ϵ�y(t��ng)��pmsmݔ��������(du��)�Q���������ͬ�r(sh��)Ҫ��pmsm��ÿ��Б�(y��ng)늄�(d��ng)��(sh��)�����Ҳ������Ҳ�Qpmsm�����Ҳ�늄�(d��ng)�C(j��)�� 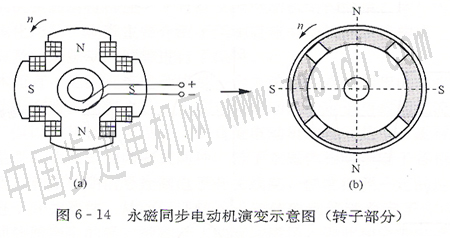
2���Y(ji��)��(g��u)��ʽ
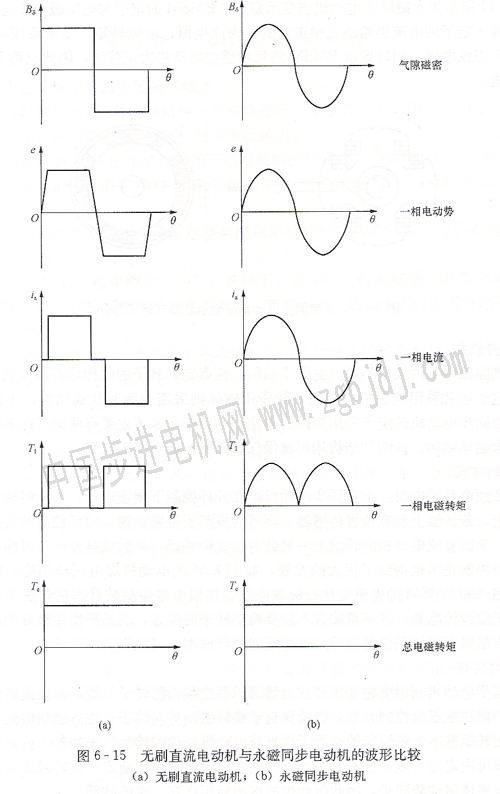
���ښ�϶���ܵȵIJ��β�ͬ(Ҋ(ji��n)�D6��15)�����߶����D(zhu��n)�ӵĽY(ji��)��(g��u)��������e���o(w��)ˢֱ��늄�(d��ng)�C(j��)�Ķ���ͨ���������༯���@�M���D(zhu��n)�������w�t���ñ�����Ƭʽ�Y(ji��)��(g��u)�������w��Ⱦ�������ͬ��늄�(d��ng)�C(j��)�Ķ��Ӳ��ö̾�ֲ��@�M���D(zhu��n)�������w��Ҫ�Ѓ�������������w�Y(ji��)��(g��u)�̓�(n��i)�������w�Y(ji��)��(g��u)���@�ɷN�Y(ji��)��(g��u)���ɴ_����϶���ܵIJ��νӽ����ҡ�
3�����Ʒ�ʽ
��(d��ng)��׃�l�Դ��늕r(sh��)������ͬ��늄�(d��ng)�C(j��)�����_(k��i)�h(hu��n)�������{(di��o)���\(y��n)�У�����(d��ng)�r(sh��)�D(zhu��n)���ϟo(w��)�����b����(d��ng)�@�M�����D(zhu��n)�S���b��λ�Â��������t�ɘ�(g��u)�ɻ���λ�÷������]�h(hu��n)���Ƶ��Կ�ʽ����ͬ��늄�(d��ng)�C(j��)���o(w��)ˢֱ��늄�(d��ng)�C(j��)���D(zhu��n)�S��һ���b��λ�Â��������������Կ�ʽ��Ŀǰ������늄�(d��ng)�C(j��)�o(w��)���������Ƽ��g(sh��)Ҳ�õ��˺ܴ�İl(f��)չ����bdcm��늄�(d��ng)�C(j��)��늉��z�y(c��)�������������C��늉��z�y(c��)����pmsm��늸�׃���OЧ��(y��ng)�����U(ku��)չ�������V����B(t��i)��Ӌ(j��)���ȡ����ǣ��](m��i)������D(zhu��n)��λ�Â�������������ζ������Ҫ�z�y(c��)�D(zhu��n)�ӵ�λ�ã����Dz�ʹ���~����b�ã��D(zhu��n)�����Äe�ķ�����(l��i)�õ��D(zhu��n)��λ����̖(h��o)���@�Ӽ��ܽ��ͳɱ���������߿ɿ��ԡ�
4��늴��D(zhu��n)��
����ͬ��늄�(d��ng)�C(j��)�������D(zhu��n)׃���������D(zhu��n)���a���B�m(x��)�z�y(c��)�D(zhu��n)��λ�ã�������(j��)�D(zhu��n)�ӵ��D(zhu��n)���S�r(sh��)�{(di��o)�����ӂ�(c��)��׃���Ŀ����l�ʣ��Դ_���������D(zhu��n)�ń�(d��ng)��(sh��)�c�D(zhu��n)�������w�ń�(d��ng)��(sh��)ͬ����������a(ch��n)����늴��D(zhu��n)�ػ������Ǻ㶨�ģ����o(w��)ˢֱ��늄�(d��ng)�C(j��)�t�H��z�y(c��)�D(zhu��n)�ӵ�����λ�ü��ɣ�����(j��)�@Щλ�ñ�ɛQ�����ӂ�(c��)��׃���_(k��i)�P(gu��n)������ͨ���r(sh��)�̣��Ķ����C�������D(zhu��n)�ń�(d��ng)��(sh��)��ƽ�����x���c�D(zhu��n)�������w�ń�(d��ng)��(sh��)ͬ����������a(ch��n)����늴��D(zhu��n)�ش���һ�����}��(d��ng)��
5�������ܶ�
���w�e�������Ƕȿ����o(w��)ˢֱ��늄�(d��ng)�C(j��)�Ĺ����ܶ�Ҫ������ͬ��늄�(d��ng)�C(j��)�ߣ��书���ܶ�һ��������ͬ��늄�(d��ng)�C(j��)��]��15�����@��Ҫ?d��)w���ڟo(w��)ˢֱ��늄�(d��ng)�C(j��)�Ƿ���늄�(d��ng)�C(j��)���������Чֵ�c��ֵ�ı�ֵҪ������ͬ��늄�(d��ng)�C(j��)�ߣ���λ��ֵ������a(ch��n)����늴��D(zhu��n)��(��ݔ������)�^��
6����(y��ng)��(ch��ng)��
�o(w��)ˢֱ��늄�(d��ng)�C(j��)���D(zhu��n)����ͨ�^(gu��)�{(di��o)��(ji��)ֱ���˵�늉���(l��i)���Ƶģ��ʿ���ϵ�y(t��ng)���^��(ji��n)�Σ��r(ji��)���^���˵������ړQ���(hu��)�����D(zhu��n)���}��(d��ng)��ʹϵ�y(t��ng)�ķ�(w��n)���Ժ̈́�(d��ng)�B(t��i)�����Բ�{(di��o)�ٷ���Ҳ�^խ���ʶ���(y��ng)���ڌ�(du��)�\(y��n)������Ҫ���Ǻܸߣ��w�e���������Ĉ�(ch��ng)�ϣ�������ͬ��늄�(d��ng)�C(j��)ͨ���������Ҳ��}���{(di��o)��(spwm)��׃�l�Դ��늣�����(du��)��(l��i)�v�����ϵ�y(t��ng)�^���(f��)�s���r(ji��)���^�F�������������ό������D(zhu��n)�ň�(ch��ng)ʽ늄�(d��ng)�C(j��)���D(zhu��n)���}��(d��ng)С-�D(zhu��n)�ٷ�(w��n)�����^�ߣ��e���@�N늄�(d��ng)�C(j��)���Ԍ�(sh��)�F(xi��n)늴��D(zhu��n)�ص�ʸ�����ƻ�ֱ�ӿ��ƣ�ϵ�y(t��ng)��(d��ng)�B(t��i)���ܺã�����m����Ҫ��߾��ȿ��ƺ͌��{(di��o)�ٷ����Ĉ�(ch��ng)�ϡ�

|


