���M늙C������ĺζ��� ���M늙C�V�������Ԅӻ����������졢�t����W�O��Ȏ�������͵��Ƅӑ����С� ���M늙C�ă��c�dzɱ������^�ͣ��ڲ�ʹ��׃�������r�����oֹ�͵��ٕr���и�Ť�أ��Լ�����λ�΄յĹ����m���ԡ��c�����oˢ늙C���ŷ�������ȣ����M늙C��һ����Ҫ���s�Ŀ����㷨��λ�÷������M�ГQ�� ���M����ȱ�c�������ܴ�ʹ�ڵ��ٻ��oֹ�rҲ����ˡ����M늙C�Ѓɂ���Ҫ�����Դ�����M�ֱ��ʣ��Լ��ز������}�_�����{�� (PWM) ģʽ���µĸ����á� ���M�ֱ��ʺ��� ���͵IJ��M늙C�� 50 ���ŘO���Ɍ��F 200 ���������L��ÿ������Ǟ� 1.8�㣬�Ɍ��F 360�� �������Cе���D����Ҳ�в����^�ٵIJ��M늙C���������_ 800 ��ȫ����������@Щ늙C����ȫ����벽ģʽ��ʩ���ڃɂ�늙C��Ȧ A(�{ɫ)�� B(�tɫ)�ϵ����ʸ��������늚����D(늚� 360��)���@ʾ����Ρ���D 3 �͈D4 ��ͻ���@ʾ���ǘӣ�늙C��Ȧ�� 90�� ����ģʽ��ȫ�����o�����늡���ˣ�ÿ�����ڵ�һ��D�� 4 �������� 8 ���벽�M�ɡ�Ҳ�����f��50 �O���M늙C��Ҫ 50 ��늚����D�������һ���Cе�D�� 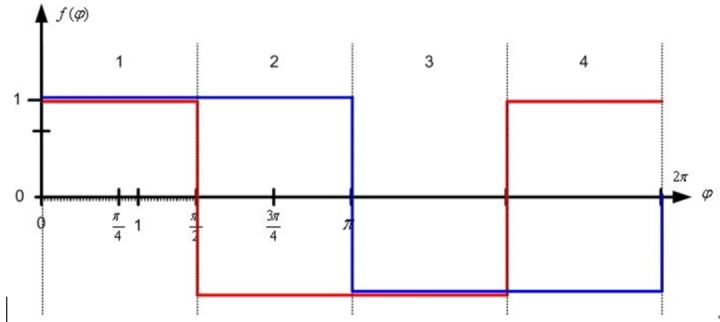

ȫ������(늙C��Ȧ A = �{ɫ�� B = �tɫ)
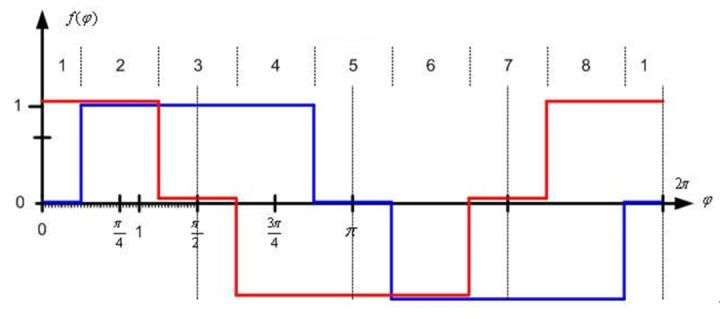
�벽����(늙C��Ȧ A = �{ɫ�� B = �tɫ)
ȫ����벽�ȵͷֱ��ʲ��Mģʽ�Dz��M늙C����Ҫ��Դ�����������˾����ӣ��@�N��ӱ鲼ϵ�y���������W���e���ڵ��ٺͽӽ�ijЩ�����l�ʕr�����^�ߵ��ٶ��£����ڑT�Ծأ��@ЩӰ푕����͡� �D�ӿ��������һ���C����ʎ���ɔ[����D ��ʾ������������O��ʩ���µ����ʸ�����D�ӌ�������ָ��λ�õķ����M����һ��ȫ����벽λ�á��c�}�_푑���ƣ��D���^�_�����@��һ��λ����ʎ���Ķ����Cе��Ӻ��������\���h��ƽ�������������^�͵��ٶ��¡� 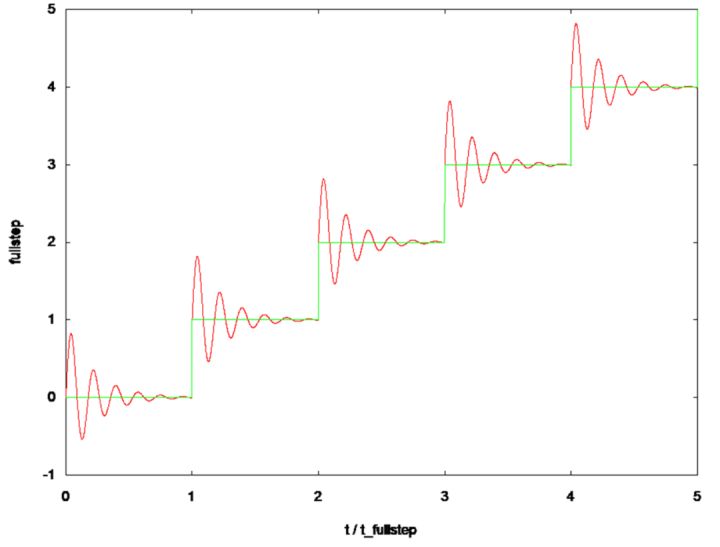
�D�ӵĔ[���О錧�����
���˜p���@Щ��ʎ�����ԑ���һ�N�Q�����M�ęC�ơ��@��һ�������IJ��E�ֳɸ�С�IJ��֣������E�����ͷֱ��ʞ� 2(�벽)��4(�ķ�֮һ��)��8��32 ���������������Ӿ�Ȧ������ȫ������������늣����������g���ˮƽ�ӽ����������Ҳ����γ��^ 4 �������IJ��E���@�������D�Ӷ�λ�ڃɂ����m�������E֮�g�����gλ�á��@�������S�m�����M늙C���������Ի��õ����ⶨ���������(TRINAMIC����оƬ֧��ԓ����)�� ���M��****�ֱ����������� A/D �� D/A ���ܶ��x��Trinamic �IJ��M늙C���������������Sʹ��ÿ�������_ 256(8 λ)���IJ��M늙C��ʹ��оƬ�ļ��ɿ��������Ҳ���������ȫ�Զ��x������Ρ� ϵ�ˣ�15801399809 � 
|


