|
|
|
| ��ǰλ��:���--���g�v��--�R�_IC���� |
 |
 |
|
| �������������D��ֱ������늙Cλ����ģ�K(wss1) |
| 2012��11��16�� |
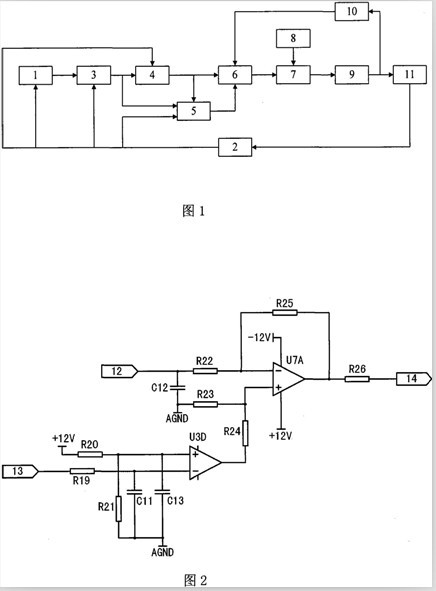
���l���ṩ����һ�N�������������D��ֱ������늙Cλ����ģ�K�������D��λ�ýo����������ʧЧ���o�·(1)���D��λ�Ùz�y���{���·(2)���D��λ��PID�������·(3)�����ٶ�PI�������·(4)���Ǽ��ٶ�PI�������·(5)�����PI�������·(6)��PWM׃�Q�·(7)�����Dz��l�����·(8)��߉H�������·(9)������z�y�·(1 O)�������D��ֱ������늙C(11)�M�ɡ�
���l��ȫ������ģ�Mʽ�·���F�����Ќ��r�Ըߡ����ɔ_����������ȫ���c�ɿ��Ըߵȣ����]�h����늙C�ӿ���ģ�K�������õĿ������ܺͿ���Ʒ�|����늙C��Ȧ�^����r�����l����ʩ�˃ɼ��^������o���ԣ�ʹ늙C������o���Ӱ�ȫ��늙C���ɿ����\�С�
1��һ�N�������������D��ֱ������늙Cλ����ģ�K�������D��λ�ýo����������ʧЧ���o�·(1)���D��λ�Ùz�y���{���·(2)���D��λ��PID�������·(3)�����ٶ�PI�������·(4)���Ǽ��ٶ�PI�������·(5)�����PI�������·(6)��PWM׃�Q�·(7)�����Dz��l�����·(8)��߉H�������·(9)������z�y�·(10)�������D��ֱ������늙C(11)�M�ɣ��������ǣ��D��λ�Ùz�y���{���·(2)�ɼ��͙z�y�����D��ֱ������늙C(11)λ����̖�����^��̖�{����ݔ�����D��λ�ýo����������ʧЧ���o�·(1)���D��λ��PID�������·(3)�����ٶ�PI�������·(4)���Ǽ��ٶ�PI�������·(5)���D��λ�ýo����������ʧЧ���o�·(1)��λ�ýo��늉���̖���D��λ�Ùz�y���{���·(2)ݔ�����̖�{�����\���ݔ�뵽�D��λ��PID�������·(3)���D��λ��PID�������·(3)��̖���^PI�������\���·�\�������̖�փ�·��̖ݔ����һ·ݔ�뵽���PI�������·(6)��һ·ݔ�뵽�Ǽ��ٶ�PI�������·(5)���Ǽ��ٶ�PI�������·(5)��̖���^PI�������\���·�\�������̖ݔ�뵽���PI�������·(6)������z�y�·(10)���z�y���������D��ֱ������늙C(11)��Ȧ�����̖�����{�����\���ݔ�뵽���PI�������·(6)�����PI�������·(6)��̖���^PI�������\���·�\���ݔ�뵽PWM׃�Q�·(7)�����Dz��l�����·(8)����a���Ĺ̶��l�ʺͷ�ֵ�����Dz�ݔ����PWM׃�Q�·(7)�У�PWM׃�Q�·(7)�����{�������κ��PWM��̖ݔ����߉H�������·(9)��
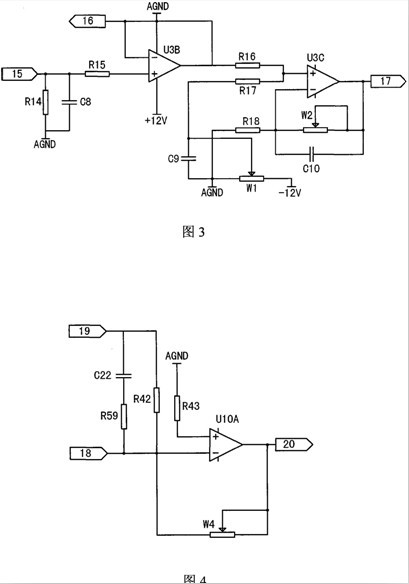
2����������Ҫ��1�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ��������D��λ�ýo����������ʧЧ���o�·(1)�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�B���������·�Դ+12V��һ·�B���������·�Դ��12V�ˣ������·�����R19��R26�����C11��C13�������\��Ŵ���IJ3D��U7A�M�ɣ�λ�ýo��ݔ����̖12�փ�·��̖ݔ�룬����һ·�����R22���������\��Ŵ���U7A�ķ���ݔ��ˣ�����һ·�����C12�������ֵ�AGND��λ�÷���ݔ����̖13�����R19��փ�·��̖��һ·�������\��Ŵ���U3D�ķ���ݔ��ˣ�һ·�����C11�������ֵ�AGND��� Դ+12v�����R20��փ�·��̖��һ·���������R21�����C13��������ֵ�AGND��һ·ݔ���������\��Ŵ���L13D��ͬ��ݔ��ˣ������\��Ŵ���U3D��ݔ����̖����裺R24��փ�·ݔ����һ·�����R23�������ֵ�AGND��һ·�������\��Ŵ���U7A��ͬ��ݔ��ˣ����R25�B�Ӽ����\��Ŵ���L17A�ķ���ݔ��˺ͼ����\��Ŵ���U7A��ݔ���ˣ������\��Ŵ���U7A��ݔ����̖�����R26ݔ����λ��PID�������·λ�ýo��ݔ��18�ˡ�
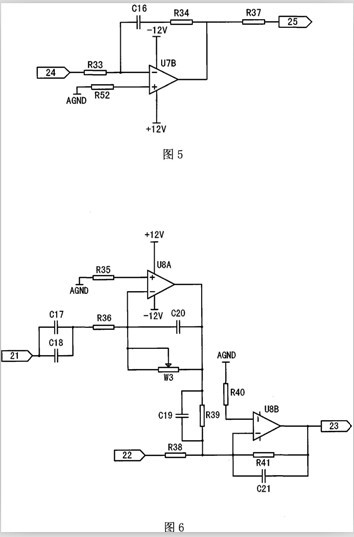
3����������Ҫ��2�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ��D��λ�Ùz�y���{���·(2)�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�B���������·�Դ+12V�ˣ�һ·�B���������·���ֵ�AGND�ˣ������·�����R14��R18�����C8��C10���λ��W1�������\��Ŵ���U3B��U3C���ɂ�������̖ݔ��15����̖�փ�·��̖ݔ����һ·�����R15ݔ���������\��Ŵ���LJ3B��ͬ��ݔ��ˣ�һ·����������R14�����C8�������ֵ�AGND�������\��Ŵ���U3B�ķ���ݔ����cݔ����ͨ�^�������B�ӣ������\��Ŵ���I-13B��ݔ����̖�փ�·ݔ����һ·ݔ�����D��λ�ýo����������ʧЧ���o�·��12�ˣ�һ·�����R16ݔ���������\��Ŵ���I-13C��ͬ��ݔ��ˣ������Դ��12V���λ��W1�������ֵ�AGND���λ��W1�����g���^��̖�փ�·��̖ݔ����һ·�����C9ݔ�������ֵ�AGND��һ·�����R17ݔ�뵽�����\��Ŵ���L13C��ͬ��ݔ��ˣ��λ��W2�����C10����һ��ݔ���������\��Ŵ���U3C��ݔ���ˣ���һ�˷փ�·��̖���룬һ·ݔ���������\��Ŵ���U3C�ķ���ݔ��ˣ�һ·�����R18ݔ�������ֵ�AGND�������\��Ŵ���U3C��ݔ����17ݔ���փ�·��̖ݔ����һ·ݔ����λ��PID�������·�е�19�ˣ���һ·ݔ�����Ǽ��ٶ�PI�������·�е�21�ˡ�
4����������Ҫ��3�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ��D��λ��PID�������·(3)�ɹ����·�M�ɣ������·�����R42��R43��R59�����C22���λ��W4�������\��Ŵ���U10A�M�ɣ����C22�c���R59�����c���R42����������·һ�˽��������\��Ŵ���U10A�ķ���ݔ��ˣ���һ�˽���19��λ���{����̖ݔ�룻���D��λ�ýo����������ʧЧ���o�·�е�ݔ����14ݔ�����̖18��ݔ���������\��Ŵ� ��U10A�ķ���ݔ��ˣ��λ��W4��һ�˽��������\��Ŵ���U10A��ݔ����20��һ�˽��������\��Ŵ���U10A�ķ���ݔ��ˣ����R43��һ���B�������\��Ŵ���U10A��ͬ��ݔ��ˣ�һ���B�������ֵ�AGND�������\��Ŵ���U10A�փ�·��̖ݔ����һ·ݔ�����Ǽ��ٶ�PI�������·�е�22�ˣ�һ·ݔ�������ٶ�PI�������е�24�ˡ�
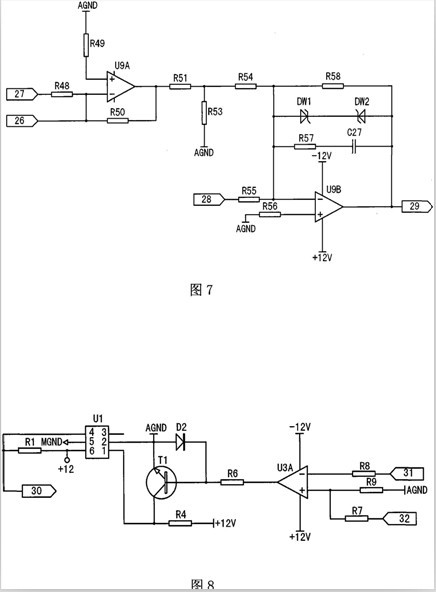
5����������Ҫ��4�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ����ٶ�PI�������·(4)�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�B���������·�Դ+1 2V�ˣ�һ·�B���������·�Դ12V�ˣ������·�����R33��R34��R37��R52�����C16�������\��Ŵ���U7B�M�ɣ����D��λ��PID�������\������̖24�˽����R33�B���������\��Ŵ���U7B�ķ���ݔ��ˣ������\��Ŵ���u7B�ķ���ݔ��˽����c16�����R34�B���������\��Ŵ���U7B��ݔ���ˣ����R52һ���B�Ӕ��ֵ�AGND����һ���B�Ӽ����\��Ŵ���U7B��ͬ��ݔ��ˣ������\��Ŵ���U7B��ݔ����̖��R37ݔ�������PI�������·�е�26�ˡ�
6����������Ҫ��5�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ��Ǽ��ٶ�PI�������·(5)�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�B���������·�Դ+12V�ˣ�һ·�B���������·�Դ��12V�������·�����R35��R36��R38��R41�����C17��C21���λ��W3�������\��Ŵ���U8A��U8B�M�ɣ����D��λ�Ùz�y���{���·�е�17��ݔ�����̖��21�ˣ������c17��C18�����c���R36�����������\��Ŵ���U8A�ķ���ݔ��ˣ����C20�c�λ��W3����һ���B���������\��Ŵ���U8A�ķ���ݔ��ˣ�һ���B���������\��Ŵ���U8A��ݔ��ˣ����R35һ���B�Ӕ��ֵ�AGND��һ���B�Ӽ����\��Ŵ���U8A��ͬ��ݔ��ˣ������\��Ŵ���U8A��ݔ������̖����������C19�����R39�B���������\��Ŵ���LJSB�ķ���ݔ��ˣ����D��λ��PID�������·��20��ݔ������̖��22�˽����R38�B���������\��Ŵ���U8B�ķ���ݔ��ˣ����R40һ���B�Ӕ��ֵ�AGND����һ���B�Ӽ����\��Ŵ���U8B��ͬ��ݔ��ˣ����R41�c���C21����һ���B���������\��Ŵ����ķ���ݔ��ˣ���һ���B���������\��Ŵ���U8B��ݔ����23�� 7����������Ҫ��6�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ����PI�������·(6)�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�B���������·�Դ+12V�ˣ�һ·�B���������·�Դ��12V�������·�����R48��R51��R53��R58�����C27��������DWl��DW2�������\��Ŵ���L19A��U9B�M�ɣ��ɽǼ��ٶ�PI�������·��23��ݔ������̖��27�ˣ������R48ݔ���������\��Ŵ���U9A�ķ���ݔ��ˣ��ɽ��ٶ�PI�������·�е�25��ݔ������̖��26�˺�ݔ���������\��Ŵ���LJ9A�ķ���ݔ��ˣ����R50�B�Ӽ����\��Ŵ��·�ķ���ݔ��˺�ݔ���ˣ����R49��һ���B�Ӕ��ֵأ�AGND����һ���B���������\��Ŵ�����ͬ��ݔ��ˣ��ɼ����\��Ŵ���LJ9Aݔ������̖��R5l��փ�·ݔ����һ·�����R53��ݔ�������ֵ�AGND��һ·�����R54��ݔ���������\��Ŵ��·U9B�ķ���ݔ��ˣ����R57�c���C27����һ���B�Ӽ����\��Ŵ���IJ9B�ķ���ݔ��ˣ�һ���B�Ӽ����\��Ŵ���L19B��ݔ���ˣ����R58�c��������R57�����C27��������ķ�����DWl����DW2�c���R58����������z�y�·�е�35��ݔ������̖��28�˺����R55�B���������\��Ŵ���LJ9B�ķ���ݔ��ˣ����R56һ���B�Ӕ��ֵ�AGND����һ���B�Ӽ����\��Ŵ���U19B��ͬ��ݔ��ˣ������\��Ŵ���L19B��ݔ������̖29ݔ����PWM׃�Q�·��32�ˡ�
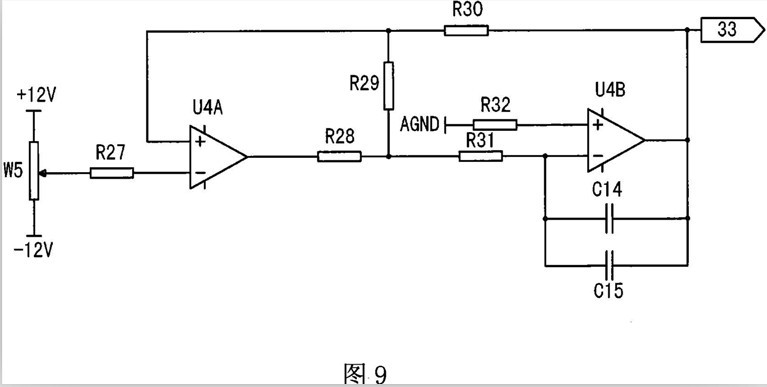
8����������Ҫ��7�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ����Dz��l�����·(8)�������·���λ����W5����衣R27��R32�����C14��C15�������\��Ŵ���L14A��u4B�M�ɣ��λ��W4�ăɶ˷քe�����Դ늉�+12V��-12V�����g���^�����R27���������\��Ŵ���U4A�ķ���ݔ��ˣ������\��Ŵ���u4A��ͬ��ݔ�����̖�փ�·ݔ����һ·�����R30ݔ���������\��Ŵ���U4B��ݔ����33��һ·����裺R29��R31ݔ�뵽�����\��Ŵ���U4B�ķ���ݔ��ˣ������\��Ŵ���L14A��ݔ������̖�����R28��R31ݔ���������\��Ŵ���LJ4B�ķ���ݔ��ˣ����c14�cc15����һ���B���������\��Ŵ���UJ4B�ķ���ݔ��ˣ���һ���B���������\��Ŵ���U4B��ݔ����33��ݔ����33��̖ݔ������PWM׃�Q�·�е�31�ˡ�
9����������Ҫ��8�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ�PWM׃�Q�·(7)�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�B���������·�Դ+12V�ˣ�һ·�B���������·�Դ��-12V��
�����·�ɴ���U3A��U1��źH11 L1�����R1����R4��R6��R9�����O��T1�����ٻ֏Ͷ��O��D2�M�ɣ������Dz��l�����·�е�33��ݔ������̖ݔ����31�ˣ������R8�������\��Ŵ���U3A�ķ���ݔ��ˣ������PI�������·�е�29��ݔ������̖ݔ����32�ˣ������R7���������\��Ŵ���U3A��ͬ��ݔ��ˣ����R9��һ���B�������ֵ�AGND����һ���B���������\��Ŵ���U3A��ͬ��ݔ��ˣ������\��Ŵ���U3A��ݔ������̖�����R6ݔ�������O��T1�Ļ��O�����O��T1�İl��O�փ�·��̖ݔ����һ·ݔ����U1��2�ˣ�һ·�����O���B�������O��Tl�Ļ��O�����O��T1�ļ�늘O�փ�·��̖��һ·����U1��1�ˣ�һ·�����R4�����Դ늉�+12V��U1��2�˽Ӕ��ֵ�AGND��U1��4�˽�ݔ����30��U1��5�˽�ģ�M��MGND��U1��6�˽��ⲿ�Դ+12V��ͬ�r�����R1�B����ݔ����30��ݔ����30��̖ݔ����߉H�������·��34�ˡ�
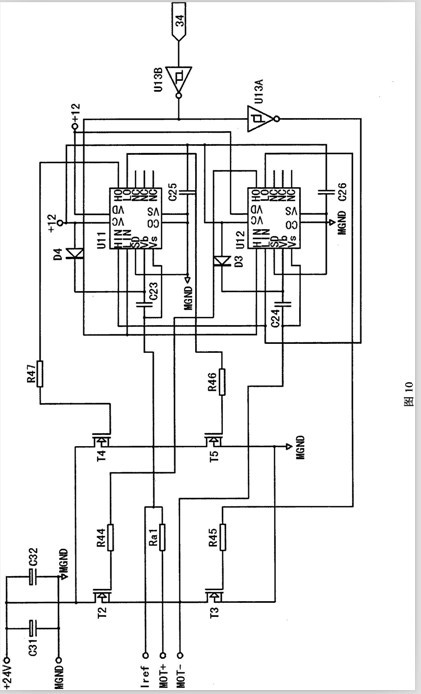
10����������Ҫ��9�����Ĵ������������D��ֱ������늙Cλ����ģ�K���������ǣ�߉H�������·(9)�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�ⲿ�Դ+12V�B����U1l��U12�е�VC��VD�ˣ�һ·�ⲿ�Դģ�M��MGND�B����U11��U12�е�VS�ˡ������·�����R44��R47���ɘ����Ral��MOSEFT����T2��T5�����C23��C25�����ٻ֏Ͷ��O��D3��D4��������оƬU1l��U12��������U13A��U13B��늽����C31��C32�M�ɣ���PWM׃�Q�·�е�30��ݔ����̖ݔ����34�˺�����U13B�փ�·��̖ݔ����һ·ݔ����U11��L,IN�˼�U12��}tIN�ˣ�һ·��������U13A��ݔ����U1l��}tIN�˼�U12��L,IN�ˣ����C25�B��U11��VS�˺�VC�ˣ����C26�B��U12��VS�˺�VC�ˣ�U1��SD���cCO���B�Ӻ�ͬ�r��ģ�M��MGND��U2��SD���cCO���B�Ӻ�ͬ�r��ģ�M��MGND�����ٻ֏Ͷ��O��D4�����O�B��Ull��VC�ˣ�ؓ�O�B��U11��Vb�ˣ����ٻ֏Ͷ��O��D3�����O�B��U12��VC�ˣ�ؓ�O�B��U12��Vb�ˣ�U11��HO�˽����R47�B��MOSEFT��T4�Ļ��O��U11��L0�˽����R46�B��MOSEFT��T5�Ļ��O��U12��HO�˽����R44�B��MOSEF"r��T2�Ļ��O�� U12��L0�˽����R45�B��MOSEFI����T3�Ļ��O��늽����C3l�cC32�������O���ⲿ�Դ+24v����һ�˽��ⲿ�Դģ�M��MGND��MOSEFT��T2��T4�ļ�늘O���ⲿ�Դ+24V��MOSEFT��T3��T5�ļ�늘O���ⲿ�Դģ�M��MGND�����C23�B��U1 1��Vb���cVs�ˣ����C24�B��U12��Vb���cVs�ˣ�MOSEFT��T2�İl��O�B��MOSEFT��T3�ļ�늘O��MOSEFT
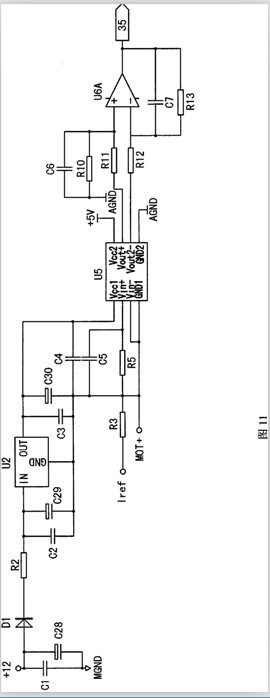
��T4�İl��O�B��MOSEFTI��T5�ļ�늘O��늙C��ȦMOT-�cMOSEFT��T3�ļ�늘O���B�����U12��Vs�ˣ�늙C��ȦMOT+���ɘ����Ral�փ�·��̖ݔ����һ·�cMOSEFI����T5�ļ�늘O���B������D11����z�y�·��Iref�ˣ���һ·����U11��Vs�ˡ�U11��U12�е�NC�_������_������z�y�·(10)�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�Դ+5V�B����U5�е�Vcc2�ˣ�һ·���ֵ�AGND�B����U5�е�GND2�������·��U2�ԴоƬ7805��U5���Թ�ź7840�������\��Ŵ���U16A�����C1��C7��늽����C28��C30����裺R2��R3��R5��R10��R13�����ٻ֏Ͷ��O��D1�M�ɣ����C1�c늽����C28����һ�˽����ⲿ�Դ+12V����һ�˽����ⲿ�Դģ�M��MGND���ⲿ�Դ+12V�����ٻ֏Ͷ��O��D1�����R2���B����U2��IN�ˣ����C2�c늽����C29����һ���B����U2��GND�ˣ���һ���B����U2��IN�ˣ����C3�c���C4��늽����C30����һ���B����U2��OUT�˺�U5��Vccl�ˣ���һ���B����U2��GND�˺�늙C��ȦMOT+�ˣ�늙C��Ȧ���Iref��̖�����R3��R5���B����U5�ġ�Vin+�ˣ�U5��Vin�����cU5�е�GNDl�����B�����늙C��ȦMOT+�ˣ�U5�е�Vout+����̖�����R11��ݔ���������\��Ŵ���U6A��ͬ��ݔ��ˣ����R10�c���C6����һ�˽������ֵ�AGND����һ�˽��������\��Ŵ���IJ6A��ͬ��ݔ��ˣ�U5�е�Vout2������̖�����R12��ݔ���������\��Ŵ���L16A�ķ���ݔ��ˣ����R13�c���C7����һ�˽��������\��Ŵ���U6A�ķ���ݔ��ˣ���һ�˽��������\��Ŵ���L16A��ݔ����35�������\��Ŵ���U16A��ݔ����35ݔ����̖�����PI�������·�е�28�ˡ� �������������D��ֱ������늙Cλ����ģ�K(һ)���g�I�l���漰һ�N�����D��ֱ������늙Cλ����ģ�K���e���漰һ�Nݔ�������������^15ţ�D�����������D��ֱ������늙Cλ����ģ�K�������Ԅӿ���ϵ�y�I��
(��)�������g��������{�ټ��g����߲��͙C(����Ȼ��C���pȼ�ϰl�әC��)�{������ָ�˵���Ҫ;�������ЙC�����Dz��͙C����{��ϵ�y�е��P�I����������ϵ�y������D�Q��Cе�ܣ���ԓϵ�y�Ŀ��ƌ��Ķ��_�����Ƶ�Ŀ�ġ���ˣ����ЙC�������ܺ�����ֱ��Ӱ��������͙C����{��ϵ�y�����ܡ���M����͙C�����r�Ąӷ��B�{�����ܣ��{�و��ЙC�������ЄӑB푑��졢���B���ȸߡ��h���m���ԏ������c���{���È��ЙC��������ԭ���ɷ֞�늴�ʽ���Һʽ��늙Cʽ�ȎN��ʽ��늴ň������ă��c�ǽY�����Ρ����Ʒ��㡢푑��ٶȿ죬������****�����ܵ���Ȧ�є���****������������ƣ�����m������С���ʵIJ��͙C�ϣ���Ҫ�������������r�£�ͨ������늙C��Һ�����ЙC��������Һ�����ЙC��������ӹ�����Ҫ��ߡ�����Ҫ���Һ����Դ���{�پ����^�͵����أ��������䑪�á�
�����D��ֱ������늙C���������ؑT���ȸߡ�ݔ�������ӑB�����졢�ɿؾ��ԶȺá��Y���o�����ҿ��p����ơ����B���ĵ͵ȃ��c���e�m���ڴ��ʲ��͙C�{���È��ЙC�����������D��ֱ������늙Cλ����ϵ�y�Ǿ��ԇ��ء�����׃���^���Â��y�Ĵ�У�������ٶȷ������D��λ�íh������h�p�]�h���Ƶȷ����������y�_������Ŀ���Ч����
��Ŀǰ�ęz����r�������������_�īI���漰���c���l����Ո���P�ļ��g(1)�Tʿ�WλՓ�ģ����ߣ���s܊����λ���������I��W�������}Ŀ�������ֻ������D��ֱ���oˢ����늙C�ŷ�����ϵ�y���� 2003��3�£�(2)�W�gՓ�ģ����ߣ��R���䣬���l������λ���������I��W�������}Ŀ��
��ȫ���������D�ǟoˢ����늙C��λ�ÿ��ơ����������Q�����ŷ����g����2001���34����6�ڣ� (3)�W�gՓ�ģ����ߣ����l�����R���䣬��λ���������I��W�������}Ŀ��
�������D�ǟoˢ����늄әCλ���ŷ�ϵ�y��������ơ����������Q����늹����g�s־����2002���2�ڡ�
ͨ�^������3ƪ�Y���M�з����l�F��
�F�Ќ������D��ֱ������늙C��ģ�K���о�ֻ���������I��W�����_չ�����҃H������С��������������늙C���Y��(1)��(2)��(3)�е������D��ֱ���oˢ����늙C��Ҫ����������C�������c��늙C������С��****�H��0��6Nm��
�Y��(1)��(2)����ϵ�y���û��چ�Ƭ�C��λ�íh������h�p�]�h���ƣ��Y�ϣ�(3)����ģ�M�·������h���ơ��oՓ�ǔ���ʽ߀��ģ�Mʽ�������īI����ϵ�y�Ŀ���Ҏ�ɺ��Ρ��ӑB���ԺͿ��ɔ_��������Æ�һ��λ�íh������h�Ć��]�h��λ�íh������h�p�]�h늙C���ƶ����ܝM����͙C�{�ٿ���Ҫ�����͙C���ԣ����ֿ��ƌ��F���s�Ŀ���Ҏ�Ɍ��r���y�Ա��C��
(��)�l�����ݱ��l����Ŀ�������ṩһ�N���Կ˷������D��ֱ������늙Cλ����ϵ�y�Ǿ��ԇ��ء�����׃���^���y�����y�ڿ��Ɔ��}���܉������D��ֱ������늙Cݔ���D��λ�õ�ƫ���Լ��_���M���Ԅ��{����������Ч������ؓ�d�ĸɔ_����������D��ֱ������늙C���o�B���Ⱥ̈́ӑB��ۙ���ܣ���ߴ��ʲ��͙C�{�����ܵĴ������������D��ֱ������늙Cλ����ģ�K��
���l����Ŀ�����@�ӌ��F�ģ�
�����D��λ�ýo����������ʧЧ���o�·1���D��λ�Ùz�y���{���·2���D��λ��PID�������·3�����ٶ�PI�������·4���Ǽ��ٶ�PI�������·5�����PI�������·6��PWM��׃�Q�·7�����Dz��l�����·8��߉H�������·9������z�y�·10�������D��ֱ������늙C11�M�ɣ��D��λ�Ùz�y���{���·2�ɼ��͙z�y�����D��ֱ������늙C11λ����̖�����^��̖�{����ݔ�����D��λ�ýo����������ʧЧ���o�·1���D��λ��PID�������·3�����ٶ�PI�������·4���Ǽ��ٶ�PI�������·5���D��λ�ýo����������ʧЧ���o�·1��λ�ýo��늉���̖���D��λ�Ùz�y���{���·2ݔ�����̖�{�����\���ݔ�뵽�D��λ��PID�������·3���D��λ��PID�������·3��̖���^PI�������\���·�\�������̖�փ�·��̖ݔ����һ·ݔ�뵽���PI�������·6��һ·ݔ�뵽�Ǽ��ٶ�PI�������·5���Ǽ��ٶ�PI�������·5��̖���^PI�������\���·�\�������̖ݔ�뵽���PI�������·6������z�y�·10���z�y���������D��ֱ������늙C11��Ȧ�����̖�����{�����\���ݔ�뵽���PI�������·6�����PI�������·6��̖���^PI�������\���·�\���ݔ�뵽PWM׃�Q�·7�����Dz��l�����·8����a���Ĺ̶��l�ʺͷ�ֵ�����Dz�ݔ����PWM׃�Q�·7�У�PWM׃�Q�·7�����{�������κ��PWM��̖ݔ����߉H�������·9��
���l���̶��ڲ��͙C����{��ϵ�y�Ŀ��ƺ��У�ϵ�y���D�ٿ���ģ�K����ģ�K���Դģ�K���˙C��Ԓģ�K���������ģ�K�ȽM�ɣ���ģ�Kͨ�^ĸ���M�����̖�B�ӡ�
ʹ�ñ��l��������Ч���ǣ�
1��ԓλ�����b��ʹ�����D��ֱ������늙C������ʲ��͙C�{�و��ЙC���M�댍���A�Σ����F�˴��ʲ��͙C��ȫ늿��ơ�
2. �����b�ñ����λ�������ٶȭh���λ�����D��λ����̖�^���{���λ�����{�����Ƀ������b�õ����ܣ��������b�Ì���ͬ��������D������늙C�Ϳ��ƌ�����m���Ժ�ͨ���ԡ�
3����ģ�M�·�M�ɵ����]�h�����������b�ù������ĵͣ�푑��ٶȿ죬���ɔ_��������ʹ�{���^�̾������õķ����Ժ̈́ӑB���ܡ�
4�����п������õ�ؓ�������{���b�á�ؓ�ɸ�׃��ͨ�^���]�h�������{���\�㣬ʹ늙C�D��λ�ÿ��ٱ����ڽo��ֵ��B�����ϵ�y��ؓ�d�ɔ_�����������D��λ�ò��Ӽ����ٶȲ��ӡ�
5����λ�����b�þ������Ƶİ�ȫ���o���ܡ��܉��ԄӱO�y�P�I�h��(��������늙C��Ȧ���)���\�Р�B���������\�Р�B��ʩ���o���_��ϵ�y�ڹ��ϕr��ֹ�¹ʵİl����
���l������Ҫ���c�ǣ�ᘌ��������������D������늙C������͙C�{�و��ЙC���Ŀ����y�c���������]�h(��h��λ�íh���ȭh��Ǽ��ٶȭh�����ٶȭh������h)ģ�M�·������늙C�ӿ���ģ�K�OӋ�������]�h�����·�У��D��λ�íh����Ҫ�DZ��Cϵ�y���o�B���Ⱥ̈́ӑB��ۙ���ܣ��Ǽ��ٶȭh�c���ٶȭh���У����ٶȭh�����������ϵ�y��ؓ�d�ɔ_�����������D��λ�ò��ӣ��Ǽ��ٶ� �h������������ϵ�y��ؓ�d�ɔ_���������ƽ��ٶȵIJ��ӣ�����h�����������ϵ�y�Ŀ����ԣ���������h�Ȳ��ɔ_������****�������ϵ�y��ȫ�\�С������@�N���Ʋ��Ե��·푑��ٶȿ졢���r�Ըߡ����ɔ_���������������Ժã��܉��ӷ��B���ܡ�
(��)���D�f���D1��λ����ģ�K���w�Y���D���D2���D��λ�ýo����������ʧЧ���o�·�D���D3���D��λ�Ùz�y�·�D���D4���D��λ��PID�������·�D���D5�ǽ��ٶ�PI�������·�D���D6�ǽǼ��ٶ�PI�������·�D���D7�����PI�������·�D���D8��PWM׃�Q�·�D���D9�����Dz��l�����·�D���D10��߉H�������·�D���D11������z�y�·�D��
(��)���w��ʩ��ʽ����Y�ϸ��D�e�������l������Ԕ����������
�Y�ψD1�����l���Ĵ������������D��ֱ������늙Cλ����ģ�K�Y���������D��λ�ýo����������ʧЧ���o�·1���D��λ�Ùz�y���{���·2���D��λ��PID�������·3�����ٶ�PI�������·4���Ǽ��ٶ�PI�������·5�����PI�������·6��PWM׃�Q�·7�����Dz��l�����·8��߉H�������·9������z�y�·10�������D��ֱ������늙C11�M�ɡ��D��λ�Ùz�y���{���·2�ɼ��͙z�y�����D��ֱ������늙C11λ����̖�����^��̖�{����ݔ�����D��λ�ýo����������ʧЧ���o�·1���D��λ��PID�������·3�����ٶ�PI�������·4���Ǽ��ٶ�PI�������·5���D��λ�ýo����������ʧЧ���o�·1��λ�ýo��늉���̖���D��λ�Ùz�y���{���·2ݔ�����̖�{�����\���ݔ�뵽�D��λ��PID�������·3���D��λ��PID�������·3��̖���^PI�������\���·�\�������̖�փ�·��̖ݔ����һ·ݔ�뵽���PI������ �·6��һ·ݔ�뵽�Ǽ��ٶ�PI�������·5���Ǽ��ٶ�PI�������·5��̖���^PI�������\���·�\�������̖ݔ�뵽���PI�������·6������z�y�·10���z�y���������D��ֱ������늙C11��Ȧ�����̖�����{�����\���ݔ�뵽���PI�������·6�����PI�������·6��̖���^PI�������\���·�\���ݔ�뵽��PWM׃�Q�·7�����Dz��l�����·8����a���Ĺ̶��l�ʺͷ�ֵ�����Dz�ݔ����PWM׃�Q�·7�С�PWM׃�Q�·7�����{�������κ��PWM��̖ݔ����߉H�������·9��߉H�������·9�������D��ֱ������늙C11����һ���Ƕȷ����ȸ�ۙݔ��ָ����̖������ʹ���ء������Ժ;��ȵ��_���A�ڵ�ָ��Ҫ���܉�M��������͙C����{�و��ЙC����Ҫ��
�Y�ψD2���D��λ�ýo����������ʧЧ���o�·1�֞��Դ�·�����·��
�Դ�·�ṩ��·��̖��һ·�B���������·�Դ+12V��һ·�B���������·�Դһ12v�ˡ������·�����R19��R26�����C11��C13�������\��Ŵ���U3D��U7A�M�ɣ�λ�ýo��ݔ����̖12�փ�·��̖ݔ�룬����һ·�����R22���������\��Ŵ���U7A�ķ���ݔ��ˣ�����һ·�����C12�������ֵ�AGND��λ�÷���ݔ����̖13(��λ�Ùz�y���{���·��16ݔ�룬Ҋ�D3)�����R19��փ�·��̖��һ·�������\��Ŵ���U3D�ķ���ݔ��ˣ�һ·�����C11�������ֵ�AGND���Դ+12V�����R20��փ�·��̖��һ·��������裺R21�����C13��������ֵ�AGND��һ·ݔ���������\��Ŵ���U3D��ͬ��ݔ��ˡ�
�����\��Ŵ���U3D��ݔ����̖�����R24��փ�·ݔ����һ·�����R23�������ֵ�AGND��һ·�������\��Ŵ���U7A��ͬ��ݔ��ˡ���衣R25�B�Ӽ����\��Ŵ���u7A�ķ���ݔ��˺ͼ����\��Ŵ���u7A����ݔ���ˡ������\��Ŵ���U7A��ݔ����̖�����R26ݔ����λ�á�PID�������·λ�ýo��ݔ��18�ˣ�Ҋ�D4��
�Y�ψD3���D��λ�Ùz�y���{���·2�֞��Դ�·�����·���Դ�·�ṩ��·��̖��һ·�B���������·�Դ+12V�ˣ�һ·�B���������·���ֵ�AGND�ˡ������·�����R14��R18�����C8��C10���λ��W1�������\��Ŵ���U3B��U3C���ɂ�������̖ݔ��15����̖�փ�·��̖ݔ����һ·�����R15ݔ���������\��Ŵ���U3B��ͬ��ݔ��ˣ�һ·����������R14���
|
|
|
|
 |
|
|


