<rp id="2hb8f"></rp>
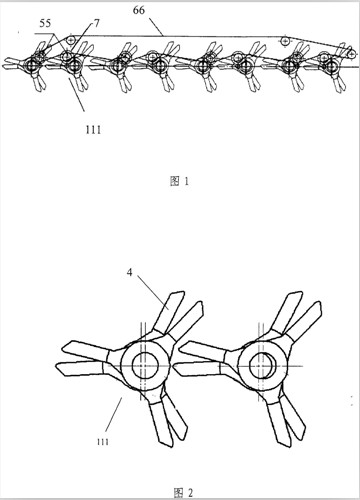
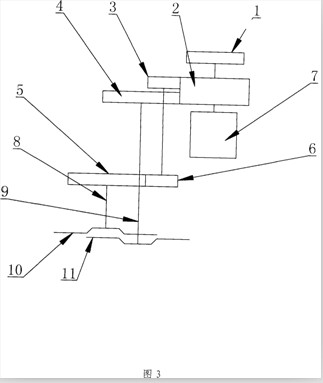
һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC�����Ƀɂ����ϵČ��z�M���b�Ø��ɣ�����һ�����z�M���b�þ��Ƀɂ���݆��һ��늙C���ɣ�����һ�����z�M���b���еăɂ���݆��ͨ�^���әC���c늙C�B�ӣ��ɂ���݆���S��֮�g�O�����g�ࡢ���D�����෴�����z�M���b����ֱ���������g���O�ã������ăɂ����z�M���b���е��������e���O�ã�����һ�����z�M���b���С�늙C��ݔ���S���߂��әC���������cһ����݆���X�Ύ�݆�B�ӣ���݆���X�Ύ�݆��ͬ�r�cһ�����]�ϭh��Ă��ӎ����p���X�Ύ��B�ӣ����ӎ����p���X�Ό������O�õĶ������z�M���b���е�늙C���F��ֹ�����F�����Ќ��z�M���b���е���݆��ͬ���\�ӣ����m�϶�����늙C�әM�ӌ��z�b�õ�ͬ���ӡ� 1��һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC�����Ƀɂ����ϵĆ�늙C���ӌ��z�M���b�Ø��ɣ����������ڣ�����һ����늙C���ӌ��z�M���b���С�늙C��ݔ���S���߂��әC���������cһ��ͬ����݆�����X�Ύ�݆�B�ӣ����е�ͬ����݆�����X�Ύ�݆��ͬ�r�cһ�����]�ϭh��Ă��ӎ����p���X�Ύ��B�ӡ� 2�������Ҫ��1������һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC�������������ڣ�����һ�������Ć�늙C���ӌ��z�M���b�þ��Ƀɂ���݆��һ��늙C���ɣ�����һ����������݆�Ͼ������O���Ѓɂ����ϵ���������һ����늙C���ӌ��z�M���b���С������ăɂ���݆��ͨ�^���әC���c������늙C�B�ӣ��ɂ���݆���S��֮�g�O�����g�࣬�ɂ���݆�����D�����෴�������Ć�늙C���ӌ��z�M���b����ֱ���������g���O�ã����������ăɂ���늙C���ӌ��z�M���b���е��������e���O�á� 3�������Ҫ��2������һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC�������������ڣ�����һ����늙C���ӌ��z�M���b���е��������쵽�����Ć�늙C���ӌ��z�M���b������������D�A���ԃȣ������cԓ�����Ć�늙C���ӌ��z�M���b���е���݆���������ⲿ��������Ƕȵ����Dλ���Ͼ������g϶�� һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC�����g�I�� ���l���漰�Cе�I�������漰�����Cе���e�漰���@�C�Č��z�M���b�ã����w����һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC���� �������g�� ���@�C���@�������^���У�������Ҫ�Ɍ����C���ӣ���һ�������șM���\�ӣ����ң������M���\�ӵ��l����Ҫ�;��@݆���D������ϡ�������߾��@�|���;��@�^���еļ������BҪ����Ҫ�����M���b�õ��c���@݆���ٶȾ��_��ϣ��б�Ҫʹ�Æ�늙C���ӌ��z�M�әC���m����׃���\�ӡ����ǬF�м��g�У�Ҫʹ������늙C���^���z�M���b��ͬ����ͬ��λ�������Ҫ���s�Ŀ���ϵ�y�� �l�����ݣ� ���l����Ŀ�����ṩһ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC�����������@�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC��Ҫ��Q�F�м��g�еĶ�����늙C���ӌ��z�M�әC����ͬ����ͬ��λ������y�ļ��g���}�� ���l�����@�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC���Ƀɂ����ϵĆ�늙C���ӌ��z�M���b�Ø��ɣ�����һ����늙C���ӌ��z�M���b���У�늙C��ݔ���S���߂��әC���������cһ�����ӎ�݆�����X�Ύ�݆�B�ӣ����еĂ��ӎ�݆�����X�Ύ�݆��ͬ�r�cһ�����]�ϭh��Ă��ӎ����p���X�Ύ��B�ӡ� �Mһ���ģ�����һ�������Ć�늙C���ӌ��z�M���b�þ��Ƀɂ���݆��һ�M���әC����һ��늙C���ɣ�����һ����늙C���ӌ��z�M���b���У��ɂ���݆��ͨ�^���әC���c���Ե�늙C�B�ӣ��ɂ���݆�����D�����෴���� ���Ć�늙C���ӌ��z�M���b����ֱ���������g���O�ã����������ăɂ���늙C�ӆ�늙C���ӌ��z�M���b���е��������e���O�á� �Mһ���ģ����⡭һ����늙C���ӌ��z�M���b���е��������쵽�����Ć�늙C���ӌ��z�M���b������������D�A���ԃȣ������cԓ�����Ć�늙C���ӌ��z�M���b���е���݆���������ⲿ��������Ƕȵ����Dλ���Ͼ������g϶�� ���l���Ĺ���ԭ���ǣ�������һ�����z�M���b�S�У��ɂ���݆��һ��늙Cͨ�^���әC���ӣ��ɂ���݆�����D�����෴�����D�ٶ���ȡ����Ќ��z�M���b���е�늙C��ͨ�^���ӎ�݆���X�Ύ�݆�B�ӵ�ͬһ�����ӎ����p���X�Ύ����ڂ��ӎ����p���X�Ύ�����ֹ�������F�����������ڻ����ɔ_�Ġ�B��ͬ���\�Ӻ���݆ͬ����λ� ���l���c���м��g�����գ���Ч���Ƿe�O�����@�ġ����l������һ�����ӎ����p���X�Ό���������0�O�õČ��z�M���b���е�늙C���F��ֹ�����F�����Ќ��z�M���b���е���݆��ͬ���\�ӣ����C�����Ќ��z�M���b���е���݆����λ�׃�� ���D�f���� �D1�DZ��l����һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC����ʾ��D�� �D2�DZ��l����һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC���е������ăɂ����z�M���b�õ���݆��λ���Pϵʾ��D�� �D3�DZ��l����һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC���еČ��z�M���b�õĽY��ʾ��D�� ���w��ʩ��ʽ�� ��Dl���D2��ʾ�����l����һ�N���ڌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC���Ƀɂ����ϵĆ�늙C���ӌ��z�M���b��111���ɣ�����һ���� ��늙C���ӌ��z�M���b��11 1�С�늙C7��ݔ���S���߂��әC���������cһ�����ӎ�݆�����X�Ύ�݆55�B�ӣ����еĂ��ӎ�݆�����X�Ύ�݆55��ͬ�r�cһ�����]�ϭh��Ă��ӎ����p���X�Ύ�66�B�ӡ� ���У�����һ�������Ć�늙C���ӌ��z�M���b��11 1���Ƀɂ���݆10��һ��늙C7���ɣ�����һ����������݆10��11�Ͼ������O���Ѓɂ����ϵ���4������һ����늙C���ӌ��z�M���b��ll1�С������ăɂ���݆10��11��ͨ�^���әC���c������늙C7�B�ӣ��ɂ���݆10��11�����D�����෴�������Ć�늙C���ӌ��z�M���b��11 l��ֱ���������g���O�ã����������ăɂ���늙C���ӌ��z�M���b��11 l�е���4�����e���O�á� �Mһ���ģ�����һ����늙C���ӌ��z�M���b��11 l�е���4�����쵽�����Ć�늙C���ӌ��z�M���b��111����������D�A���ԃȣ������cԓ�����Ć�늙C���ӌ��z�M���b��1��1�е���݆10��11����4�����ⲿ��������Ƕȵ����Dλ���Ͼ������g϶�� �Mһ���ģ���D3��ʾ�����l�������چ�늙C���ӌ��z�M���b�õĆ�늙C�Ӷ���Ԫ�әC���еĆ�늙C���ӌ��z�M���b���У�������늙C7��ݔ���S�Ϲ̶��O����һ���ڡ��X݆2���c늙C�Sƽ�е��O����һ���ڡ�һ�S8��һ���ڶ��S9�������ĵ�һ�S8�ăɶ˹̶��O����һ���ڶ��X݆3��һ�������X݆6�������ĵڶ��X݆3�c�����ĵ�һ�X݆2���ϣ������ĵڶ��S9��һ�˹̶��O����һ�������X݆4�������ĵ����X݆4���·��O����һ�������X݆5�������ĵ����X݆5�c�����X݆4֮�g�O����ƫ�ľ࣬�����X݆4�c��һ�X݆2���ϣ������X݆5�c�����X݆6���ϣ���һ��݆10ͬ�S�B���ڵ����X݆5�Ķ˲����ڶ���݆11ͬ�S�̶��ڵڶ��S9����һ�ˣ��ڶ��S9���^�����X݆5�����^��һ��݆lO����һ��݆10�c�ڶ���݆11֮�g�O�����g϶�����¯B�á� �ڱ���ʩ���У�늙C7ͨ�^�X݆�����b�Î��ӵ�һ��݆10�͵ڶ���݆1l���෴�����D�ӣ��������D����ȣ��ɂ������\�ӵĵڡ���݆10�� �f������4��4퓵ڶ���݆11��****�����\��܉�E�о��д_���Ľ����c���@Щ�����c������ĈA�ĽǷֲ������D�A���ϣ�����һ��݆10�͵ڶ���݆11�քe�Ѓɂ���r�������c�Ľ�����x��90�ȣ�����һ��݆1 O�͵ڶ���݆11�քe��������r�������c�Ľ�����x��60�ȣ���һ��݆10�͵ڶ���݆11��****�����ăɂ������c�Ǽ����M���\�ӵēQ���c����һ��݆10�͵ڶ���݆11֮�g�O�õ�ƫ�ľ�ɱ��ڼ���ץס��ժ�£��ڡ�һ��݆10�͵ڶ���݆1l���������ړQ���c֮�g�ľ��x���\�ӣ����@�ξ��x�Ķ��^����һ��݆1 0���������ڶ���݆11�����ˣ��ڶ���݆11�������ĵ�һ��݆10������ժ�¡�������һ����늙C���ӌ��z�M���b��111�У��ɂ���݆10��11��һ��늙C3ͨ�^���әC���ӣ��ɂ���݆10��11�����D�����෴�����D�ٶ���ȣ����І�늙C���ӌ��z�M���b��11 1�е�늙C3��ͨ�^���ӎ�݆�����X�Ύ�݆55�B�ӵ�ͬһ�����ӎ����p���X�Ύ�66���ڂ��ӎ����p���X�Ύ�66����ֹ�£����F�����І�늙C���ӌ��z�M���b��11 1�е���݆10��1l��ͬ���\�ӣ������C����������4�ڻ����ɔ_�Ġ�B��ͬ���\�ӣ�����늙C�ӆ�늙C���ӌ��z�M���b�õ���݆10��11����λ�׃��