�����_�P����늄әC늴ň�����Ԫ����
ʷ��÷������ɭ������÷���ܿ���
(��ɽ��W���V�|�麣519082)
ժҪ����������Ԫ����ܛ��ANSYS��������(6��4)�_�P����늄әC�Ķ��S늴ň��M����ϵ�y�ķ�����Ӌ���늙C�ڲ�ͬ�D��λ�ýǺ�����µĴň��ֲ������ܺ��o���ԣ����_�P����늄әC���O֭�������Ǿ���ģ���Լ����Ʋ��Ե��о��ṩ�˿ɿ�������
�P�I�~���_�P����늄әC��늴ň�������Ԫ�������Ǿ��ԣ�ANSYS
�ЈD���̖��TM352 �īI���R�a��A ���¾�̖��1004��7018(2009)12��0035��03
0����
�_�P����늄әC(���º��QSRM)�ǽ�����S��늙C�W����ӌW�������ӺͿ�����Փ�İlչ��Ѹ�ٰlչ������һ�N��������늙C��SRM����Y�����ΈԹ̡��{�ٷ��������ɿ��Ըߡ��ɱ�������Ч�ʸߵȃ��c���V��������늄�܇��ϵ�y�����������ͨ�ù��I(�L�C��ˮ�á����s�C��)���ŷ��c�{��ϵ�y������늙C������늙C(�����C�����հl�әC���x�ęC��)��
����SRM�L���\����ͻ�Ǿ��Ԡ�B���ҿ��ƅ����࣬������S�D��λ�ö�׃�����o���õ����νyһ�Ĕ��Wģ�ͺͽ���ʽ������SRM����Փ�о����OӋ�Ϳ�����̎�ڰlչ�A�Ρ��������ᘌ�SRM�������о���Ҫ�����ھ��ԡ��ʾ���ģ�ͷ��������@Щģ�͞���A�Ŀ��Ʒ��棬���īI[4��5]���c늙C���H���Լ��\����r�����^���`�
SRM�ķǾ��Է����ɞ��о��ğ��c���īI[6]�����Ă�����λ�õĴŻ��¾���Ӌ�㶨��һ�O�ď��������īI[7]����������D��λ�Ì���朵�Ӱ푣������˴���P��������D��λ�õ��B�m�������īI[8]Ӌ����늙C���o���ԡ�
��������ANSYSܛ������������(6��4)SRMģ�ͣ��������M������Ԫ������Ӌ��늙C�Ĵň��ֲ������ܺ��o���ԣ���SRM���OӋ���Ǿ��Է���Ϳ����ṩ����Փ���A�Ϳɿ�������
1 SRM��ģ�c����
1��1ģ�͵ĽY������
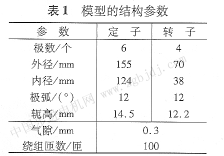
늙Cģ�Ͳ�������6��4�Y�����Y���������1��ʾ��
1��2�������O��߅ֵ���}
�������^�������Դ���ڣ�Ӌ��r횲���ʸ����λ���������¼��O��
(1)����늙C�˲��ň�Ч�����ň����S�����ֲ���ʸ����λA������ܶȣ�J���S�����Az��fz���ʴŸБ�����ֻ��Bx��By(����A������Az��J��������)��
(2)�ň��H��������늙C�ăȲ������ӵ��ⲿ���D�ӵăȲ�߅���J������ʸ����λ����
(3)��Ӌ��׃�ň��ڌ�늲������綨���@�M���C���еĜu����������ˣ�SRM�Ĵň�������Ǿ����Ʒ�����̎����
�������ϼ��O���M��sRMȫ��������Ķ��S�o�ň�Ӌ�㣬��ʸ����λ����������߅ֵ���}��
ʽ�У��̞���ϵĴŌ��ʣ�T1�鶨����A�ܣ�T2���D�ӃȈA�ܡ�
1��3����(6��4)sRM��ģ�c���
ANsYs�п��Էքe����GuIģʽ��������ģʽ��������ķ�������ֱ�^��Ч��Ҋ��������ǰ̎���A�β���GuIģʽ��̎������̎���A�β���������ģʽ��
l 3��1��������ģ��
��������(6��4)sRM����ÿһ�O���f���D���D�^90���Cе�Ǟ�һ�����ڣ��������Q��ֻӋ���D���D��45������������ɷ������������X�����c�D�Ӳ����Č��Rλ�ö��x���=0��λ�á���������ANsYs������1����ģ�ͣ���D1��ʾ��
1��3.2���x���ό��Լ��x��������
�����O�ÿ՚�^�����Ņ^��������˅^����������^�IJ��ֲ��ϡ����Ќ��Ņ^��Ǿ��Բ��ϣ���һ�lB��H����(��D2��ʾ)��������ό��ԣ����ಿ�ִŌ��ʾ���1���x������ό��ԣ������ό����@ʾ����D3��ʾ��
1��3��3���־W��
���x��Ԫ��ͣ��x��PLANE53��Ԫ�����������������c��smansize��ʽ���� �־W�����D4��ʾ��
l.3��4ʩ��߅��l��
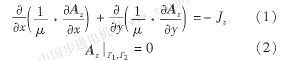
���ڱ��ĵ�sRM���S������ֻ���]һ��R��߅��l��������늙C�����⏽���D�Ӄȏ���ʸ����λ Az��0����ʽ(1)��ʽ(2) ����߅��l����ʩ��߅�� �l������D5��ʾ��
1.3��5���x�Ż�����
���x�ֲ�����ϵ��������ϵ,��Ҏ�����w�Ż�����.�x�����w��Ԫ,�����D�ӆ�Ԫ������ϵ��ֲ�����ϵ,��D6��ʾ.
1 3��6���d�����
�˺��������������ʽ�M�Ѕ���ݔ�룬�����O�ü���⡣
���@�M���w����D�����������ʽ���O������ܶȞ�Jz���t�У�
ʽ�У�s���d����Ȧ�M����e��n���@�M��Ȧ�є���i��ÿ��ݔ�����������ܶ�Jz�Ć�λ��A��m2�����S����Ԫ�����У���ֵ��ʾ�����+z����ֵؓ��ʾ�����һz����
sRM�ڷ��B�\�Еr�������϶��ǃ������������@�Mͬ�r��š�������һ���@�M��Ş����M�з��������༰���������@�Mͬ�r��ŵ���rֻ���ij�����ͨ���@�M�Є�������ֵ���Ɍ��F��
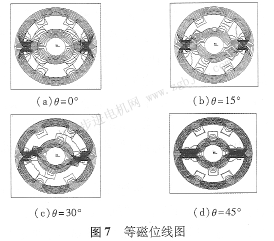
�O���������from solver��ʸ����λ���ݲ��10-4����magsolv�������ʸ����λ�������ȴ�λ���D����D7��ʾ��
�ĈD�п��Կ�����sRM�Ĵ�ͨ��Ҫ�������ֽM�ɣ�һ�����Ƕ����@�Mͨ����Ą�ŘO����϶���_�D�ӘO������ͨ���ڶ������ǽ��O�g��϶���_����ܗ��©��ͨ�����������ǏĄ�ŘO���O�g�����@�M�����g©��ͨ��
�D��λ�ýǦ�=O���r����϶�����^����ͨ����^���D��λ�ý���u����r������ͨ��©��ͨ���S֮�����D�ӘO�����غϕr���O���ľֲ�ͷdz����أ��S�����D�ӘO�غϲ��ֵ������O�����⣬�������ֻ�������ͣ��˕r늙C�Ĵ�ͨ��Ҫ������ͨ��©��ͨ����ֻ�����g©��ͨ��
1��3.7�������܅���Ӌ��
��������sRM���ԣ����D��λ�ý��Ժ��@�M���i��һ��ֵ�r����:
ʽ�У�p��A��B��c���ࣻ3��4�քe�����@�M����A3��A4����D8��ʾ��s���@�M�M����e��n���@�M�є���lFc���F���L�ȡ�
A���@�M���Ըм��cB��c����Ļ��О�:
���ó���Ӌ�����õ�ʸ����λAz������ʽ(4)��ʽ(8)�������������Mһ��Ӌ�㼴����ØәC�ĸ�����܅�����
ԓ���������ÃɌ�ѭ�hǶ��ʽ���ȌӞ����ѭ�h������ÿ���D��λ�ã�ݔ�����ֵ��5 A���ӵ�40 A�����L��5 A����Ӟ��D��λ��ѭ�h���D��λ�ý���0����45��֮�gÿ��5������һ�Ρ�
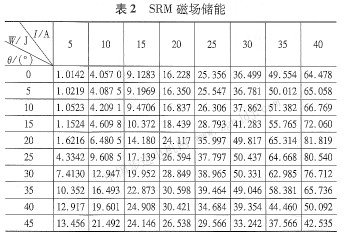
����senergy�꾎��Ӌ����әC���ܣ����2��ʾ��
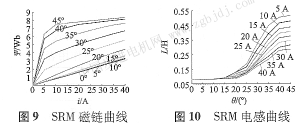
����lmmix�꾎��Ӌ����әC���������늸���������D9���DlO��ʾ��
�D9���D10�У����D��λ�ýǞ�O����15���r������{������ֱ�����cݔ�����ֵ�����ȣ�늸Ў��鳣�����S���D��λ�ýǵ�������c����ʷǾ����Pϵ���ҷǾ��Ի�Խ��Խ���أ�늸��S���D��λ�ýǵ�����������D��λ�ýǽӽ�40���r����机�늸е����ӷdz�������
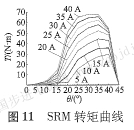
��������Maxwell��������������·��Ӌ���D���D�ء������D�ӘO�������A���������ǰ̎���О鶨�D�Ӷ��x�ֲ�����ϵ(�A������ϵ)��Ӌ���D��ǰָ��·�����D���⏽���\�г�������D����Dll��ʾ��
�D11�У��D���Sݔ��������Ӷ���u�������ֵ�^��r���D�������pС��ͬһ���ֵ�£����D��λ�ýǞ�0����45���r���D�ػ������㣬ǰ�ߞ鲻����ƽ��λ�ã����ߞ鷀��ƽ��λ�á������D�ӘO�����غϕr���D���^��
2�Y�Z
���Ļ���ANNY8ܛ��������(6��4)SRM�M�н�ģ������Ԫ������Ӌ��ó��әC�Ĵ��ܺ��o���ԡ�Ӌ��Y���ʴ_��ӳ��SRM���������ԣ���SRM���OӋ�̓����ṩ�˿ɿ�����Փ����������ڂ��y���������ֵ�OӋ늙C�ķ��������IJ��H�s���_�l���ڣ������˳ɱ������Ҵ������˜ʴ_�ȡ�������Ӌ��Ĵ��������늸�������SRM����Ҫ���ԣ����Mһ������SRM����Matlab��Simulink���N���r�\�еĄӑB�Ǿ��Է��棬��߷����ٶȺ;��ȣ���Q����ģ�ͺ͜ʾ���ģ���`���^��Ć��}������SRM���F��Ч�ɿ��Ŀ��Ʋ��Ծ�����Ҫ���x��
|