��ժҪ���о���һ�N�·f������ƫ�������ɶȽ�ֱ����ϴ��S�С��S��Ҹ������Ʋ���ֱ���ӣ�����Ҹ������Ʋ���������׃���ṩ����ӣ���һ�K�����ŵĭh�������wͬ�r�ṩ�S����ƫ�Ŵ�ͨ��ͬ�r����һ�M��Ƭʽ���O�����S���p�ŘO��Y������������ˏ���ŘO��e����ߴ��S�еď�����d���������ڱ��C������d������r�£��pС�S��ߴ硣�S�м����˽����ӡ�����ƫ�ü�����һ�S���Ͽ��Ƶȃ��c����Փ����������Ԫ�����C�������S�еĽY���OӋ���Ӻ��������őҸ�����ϵ�y����ʡ��ͻ�����lչ����һ�����x��
�����P�I�~�����S�У�����Ԫ�������Ҹ��������Wģ�ͣ�ԭ���� ���ڑҸ�ϵ�y�У��⸡��Һ��ϵ�y��Ҫ���Ì��T�Ě≺��Һ��ϵ�y����ʹϵ�y���r���F��
�������ԑҸ�ϵ�y�����w�eС���Ҹ����a��ϵ�yС������ϵ�y���ζ�������ҕ���ڴ��S��֧��늙C���o�S��늙C�У�����Ҫ���S�еđҸ��팍�F�傀���ɶȵ���ȫ�Ҹ��\�У��ʴ��S�е��S��ߴ�ֱ��Ӱ푑Ҹ�늙Cϵ�y�����ܣ��S��ߴ��^��ʹ�D���S�Ƚ��ͣ��������D�r�[�����������R���D�ټ����d������ߡ�����ֱ�����S����Ҫ�ɂ�ֱ�����ʷŴ������ƃɂ����ɶȵđҸ�����ʹϵ�y���s�������ڹ��I���ã��Ϊ����S����S����Ҫ�S�������P�����Ҹ�ϵ�y�S��ߴ��^��Ӱ����\�����ܡ������ڏ����S����S����Y�ϵ�����ƫ���������ɶȽ�ֱ����ϴ��S�нY���Ļ��A��������һ�M��Ƭʽ���O�p�ŘO��Y�����ڲ��pС���S�г��d����ǰ���£���Ч�pС�˴��S�е��S��ߴ磬���R���D�ٵ�����őҸ�늙C���ͻ�����lչ���ЬF�����x��
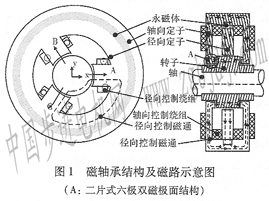
�����Ҹ��C�������Wģ�ͣ�1�Ҹ��C��D1�ǽ�ֱ�������ɶȻ�ϴ��S�д�·ʾ�������D���D�Ў����^�Č�����ʾ�����w�a�����o�Bƫ�Ŵ�ͨ�����������w��N�O���l�����^�S���ӡ��S���϶���D�ӡ������϶�������ӡ����ص������w��s�O�������^(���^�����ɿ�������������ֶ��t�_��)��̓����ʾ���ƴ�ͨ���S����ƴ�ͨ���S���ӡ��S���϶�c�D�ӃȘ��ɻ�·��������ƴ�ͨ�ڏ����S���ӡ������϶�c�D���γɻ�·(�D1�е�̓��)���S������@�Mͨ��ֱ��늣��γ��S����ƴ�ͨ������ϵ�yͨ�^λ�Ƃ������������S��λ����̖�������S���@�M����Ĵ�С���Ķ�ʹ늙Cϵ�y�������S��ƽ��λ�á�
����������S�еĹ���ԭ���c�o�S��늙C��ͬ�������@�Mͨ�����ཻ��늣��a��һ�����D�ĆΘO���ƴ�ͨ���ஔ��һ���D���@�M�O������O���������@�M�O������1��Ԫ�S��늙C���M��p2=p1+1������Ʒ����c�o�S��늙C�D��λ�ƵĿ��Ʒ�����ͬ��������ֱ�����S�Ё��f��������һ�����ཻ�����ʷŴ�������ɂ�ֱ�����ʷŴ���������ɂ����ɶȿ��ƣ������˿���ϵ�y��ͬ�rҲ�����˿���ϵ�y�ɱ���
����1��2���Wģ��
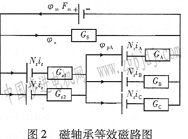
�����õ�Ч��·���������S�еĔ��Wģ�͡����ȣ����˺������}�����O�D��λ���S���Ӽ������ӵ����ģ����Ԝu����������Ӱ푣����ԴŜ�����������Ӱ푣�����늴��F�c�D��֮�g��϶�����©�š����ڶ��Ӽ��D�Ӿ��ǴŌ��ʷdz��ߵĹ��Ƭ���ϣ�����Ӌ���к��Զ��Ӽ��D�ӵĴ��衣�D2����S�еĵ�Ч��·��Fm�������w�����ṩ�Ĵńӄݣ���m�������w�l���Ŀ���ͨ����s�鿂©��ͨ��Gs��©�Ō�����߅�S���϶����߅�S���϶�ĴŌ��քe��Gzl��Gz2������3����϶�Ō��քe��GAGB��GC���F���O�D���S������ƫ��z�������������ƫ��x��y���t����϶̎�ĴŌ��飮
ʽ�У��̡�����մŌ��ʣ�5z���S��ŘO��e����ÿ�O����ŘO����e(��������ŘO�c�p�ŘO��ď���ŘO��e)����z���S���϶�L�ȣ���R�鏽���϶�L�ȡ�
����������·���������ɣ�
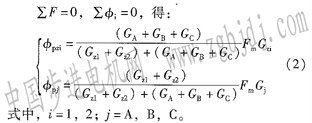
�������S���\�Еr�����S��������@�Mʩ�ӿ���������ڸ���϶̎�Ĵ�ͨ�������wƫ�Ŵ�ͨ�c���ƴ�ͨ�įB�ӣ�
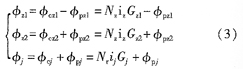
�����S��Ҹ���ģ�ͼ������S���D���S������ƫ������z��Ҫʹ�D�ӻص��S��ƽ��λ�ã��t��Ҫ�ɂ��S���϶̎�ϳɴ�ͨ�a���ĺ����������ň����c��ͨ���Pϵ���S��Ҹ���Ӌ�㹫ʽ�飺

����ʽ�У�Fz2���D����߅�ܵ��Ĵ�������Fzl���D����߅�ܵ��Ĵ�������ʽ(1)��ʽ(2)��ʽ(3)����ʽ(4)����ƽ��λ��̎����(x��y����r��z=����a)��Fz����׃�Q����ȥ���A���ϟo�FС���ó�ԓ���S����ƽ��λ�ø��������S��Ҹ������Ի����Wģ�͞飺

����ʽ�У�kz���S������λ��ϵ����kiz���S���������ϵ�����ڴ��S�нY�������c�_����kz��kiz���鳣����
��������Ҹ���ģ�ͼ������S���D���ڏ���������ƫ������x��y���t�������϶̎�ϳɴ�ͨ��A����B����C�a���đҸ����քe�飺

����ʽ�У�j=A��B��c����FA��FB��FC���քeͶӰ���S��y�S�ϣ��t����Ҹ���Ӌ�㹫ʽ�飺
��������ʽ(1)��ʽ(2)��ʽ(3)����ƽ��λ��̎����(x��y��6��z����a)��Fi(j=A��B��c)�M�о��Ի�̎������ȥ���A���ϟo�FС���ã�
����ʽ�У�Fpm��ƽ��λ�Õr�����w��ͨ�ڏ������϶̎�a���Ĵ��������С����ȵġ�kir�鏽���������ϵ�����ڴ��S�нY�������c�_����Fpm�����鳣����
����2.1���S���OӋ������Ԫ����
2��1���S�нY��
���S���OӋ����Ҫ�����l�����Č����S���������������״������Ƭʽ6�O�����S���p�ŘO��Y�������Ï����S�������ɶȶ�λ�D�ӣ����D�Ӿ����ù��Ƭ�B�����ɣ���Ч�pС�u���p�ļ��Ŝ��p�ģ������w������F��(NdFeB)����Ȧ��������~���@�ơ���2����S�е���Ҫ�Cе�����������������@�M������λ�ã���Ч���ӏ�����d�������ҽY������o�����S���L����Ч�pС���D3�鱾���OӋ�Ĵ��S�нY�����S�����϶����O��3 mm��
�������ĵĴ��S�о��Ѓ����@�M����������@�M�c�S������@�M��������Ĵ�·�Y��ʹ���������c�S��Ĵ�·������������Խ���ܡ����S�Џ�����ƾ�Ȧͨ�뽻��늺ɮa���ΘO���D�ň����c�����w�ň��B�ӣ��γɲ����Q�ֲ��ň����a�����������S����ƾ�Ȧͨ��ֱ��늺ɽ����S����ƴ�ͨ���c�����w�ň��B�ӣ�ʹ���S��ɚ�϶̎�ň����ȣ��Ķ��a�����D���S��Ć�߅��������
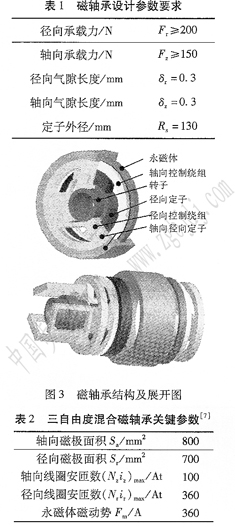
����2��2����Ԫ��������ʹ��As0ft/maxwell��������Ԫ����ܛ����ԓ�S���M�н�ģ����������3����S�о�Ȧ�քeͨ�������a���Ĵ�ͨ�ֲ��������w�a���ď����S��ƫ�Ŵ�ͨ���Q�ֲ����˕r�]�Џ������a��������������@�M���d���ཻ��늣�ijһ�r�̮a���Ŀ��ƴ�ͨ�c�����wƫ�Ŵ�ͨ�B�ӣ����Ə����·�ľ���ֲ����a����������ď�������ͬ�r�S���·��Ȼ���Q�ֲ����o��߅�������a�������S������@�Mͨ��ֱ��늣��a���Ŀ��ƴ�ͨ�cƫ�Ŵ�ͨ�B�ӣ�ʹ�S���ͨ������ֲ����a���S��Ć�߅��������ͬ�r�������ͨ���Q�ֲ������a�������������S������ƾ�Ȧͬ�r���d������S������ƴ�ͨ�c�����wƫ�Ŵ�ͨ�B�ӣ�ͬ�r�a���������c�S���߅����������Ӌ��Y���ó��������c�S����ƴ�·֮�g�]����ϣ��f��ԓ���S�о����Խ���ܡ��ڿ����^�����S������ƴ�ͨ����������ϵ�y���Ρ�
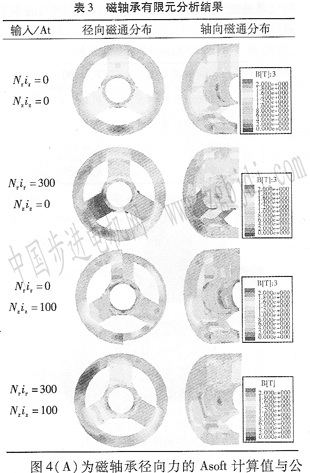
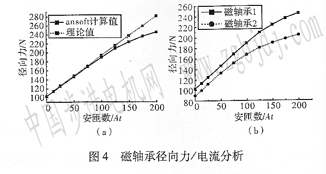
�����D4(A)����S�Џ�������AsftӋ��ֵ�c��ʽӋ��ֵ����֪AsonӋ������S�е�****������d���_240 N����ȫ�M���OӋ����Ҫ������������ԪӋ��ֵ�c���Wģ�͵�����ֵ�ܺõıƽ������Ҿ��Ի��̶��^�ߣ�Ҳ�f�����ڏ���λ���^С����r�£��������c����dzɾ����Pϵ�ġ��cͬ���S��ߴ�ě]���p�ŘO��Y���Ĵ��S������^�D4(B]������ԪӋ��Y�������ĺ���****��������180 N���hС�ڱ��Ľ�B�����ʹ��S�У�������ͬ�ď�������������a���ď�����С��ǰ�ߣ�����f��������Y������S�е����ܵõ��������f����׃���S�Џ����������@�M����λ�ã������Ƭʽ���O�����S���p�ŘO��Y�������Դ����ߴ��S�еď�����d����ͬ�r�����pС���S��ߴ硣
�����YՓ��Փ����������ԪӋ��Y�������������Ƭʽ�����S���p�ŘO��Y������Ч�U���ˏ���ŘO��e��ʹ�����ʹ��S�����S��ߴ粻׃�r�ܮa������ď�����������Y������o�������ӳ��d�����Ǵ��S���^������ĽY�������őҸ�늙C����ϵ�y���ͻ������ʰlչ����һ��Ӱ푡�
|











