���ʽ���M�ӆ�Ԫ�ĸ����\������
������1���n���r1���� ��2���� ��2
(1�������I���I��W�������� �����I 150001��2���麣�\��늙C����˾���V�| �麣 519001)
ժҪ��ӑՓ�˻��ʽ ���M늙C�ĽY�������������\�����ܵ�Ӱ푣������D���F�ĵĆ�Ԫ�����@�M�є�����ϵ�y�ߴ�ă����ȡ����M�ӆ�Ԫ�ĸ����\�����ܿ�����****����������ָ�ˣ�����Ҫȡ�Q��늄әC�ľC�υ���(K��L)���Լ�������늉�������� �P�I�~�����ʽ���M늄әC���Y�������������\�����ܣ�****��������
�ЈD���̖��TM383.6 �īI���R�a{A ���¾�̖��1001-6848(2000)05-OD03-04
l �� ��
���ʽ���M늄әC���ĽY����ԭ�����v��������l�_���ŸБ���ʽ����ͬ��늄әC�������D���X�������ژO������һ���ஔ�ࡣ������͵��D���X��Z=50������1�_�O����P-Z��=50��ͬ��늄әC�������@�Mͨ���l�ʣ�һ50Hz�Ľ�׃����r��ͬ���\�е��D���D�ٞ飺
���鲽�M늄әC�\�Еr���������o늄әC��늣����Ĺ��Ų����H����1�_��׃�����ɿ����}�_���l�ʿ���늄әC�@�M������l�ʣ��Ķ���׃늄әC���D��֮�g���Pϵ���£�
�����Ŀ����}�_�l�ʷքe��0.4��4��8k�}�_��s���������ǸĞ��=0.360���cͬ�ӵ��D�ٌ����Ğ�f��=1��10����Ҋ���ڲ��M늄әC���mȻ�D���c�����}�_�l�ʳ����ȣ����H�HJcp��߀���ܱ����D�ٵ��x�ͣ����H�����c����ǵij˷e�ű����D�ٵĸߵͣ���ʽ(3)��ʾ��
�˜ʵĻ��ʽ���M�ӆ�Ԫ��ͨ����ÿ��犎�ʮ���װ��D�ķ������\�У�ÿ��犽ӽ�ǧ�D�����ϑ��J���Ǹ����\�еķ����ˡ��ܶ����È���Ҫ����D�ٲ��ߣ����ؾ��и�C�������_�Ŀ��ƾ���һ����������Ҫ���M늄әC���D�كH2r/sݔ���ęCе���ʺ�С��ͨ�������ᵽ�����Ĺ��ʣ�ֻ�ᵽݔ���D�ص�Ҫ��͆����l�ʵȡ�
�S���������g�İlչ��������߄ڄ����a�ʣ��ܶ������b��Ҫ���M늄әC���d�����\�У�������b�C��ӡˢ�C���ƴ��C�ȡ�����о����_�l�����\�����ܺõĻ��ʽ���M�ӆ�Ԫ�ɞ鮔ǰ��Ҫ�İlչ�����������ߺ��Ñ����Pע��
�����\�����ܵ���Ҫָ�˻����ָ�ˣ�������****�������ʻ�****���ù��ʁ���ʾ�������о�늄әC�������Ļ��������������\�����ܵ�Ӱ푣��Ì����f�������\�����ܵ����ɻ���������������_�OӋ���x�ò��M�ӆ�Ԫ��
2 �����Pϵ
���ʽ���M늄әC����ǰ����������ο��Ƶ�������늣���һ���l�ʷ������@�M��������c�o�����һ�£����ֻ�����׃��ֵ��늄әC��****ݔ���D��Ҳ�ܱ��ֻ�����׃��****ݔ�����ʄt�S�D�����߶�����һ�����l��fk�Ժ����ʧȥ���ƣ����S�D���Mһ�����߶��pС��������****ݔ���D��Ҳ�½���Ҫ��1�_늄әC����������ߚw�Y���R���l��fk������������****ݔ������Ҳ������Ԕ���ķ������о��������@���ָ���c늄әC�������Ļ�������֮�g�������Pϵ[1]��
�cfk�������D�ӽ��ٶȣ�
****�������ʣ�
****���ù��ʼs�飺
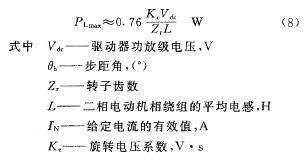
����ʽ�ӣ���Ҫ��ʽ(6)��(8)������ر������ӆ�Ԫ�ĸ���������Ҫȡ�Q��������늉�(V)�����(IN)���Լ�늄әC�����D늉�ϵ��(K)��늸�(L)���D���X��(Z)������һ�N늄әC��Z���Dz�׃����Ke�����ǿ���ͨ�^�F�ĺ��@�M���OӋ����׃��Vd����JNҲ����ͨ�^�x�ò�ͬҎ�����������׃��
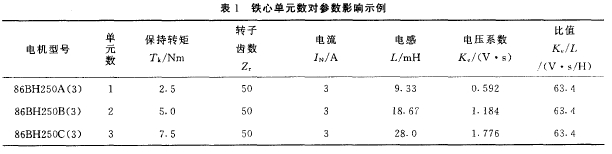
3�D���F�Ć�Ԫ����Ӱ�
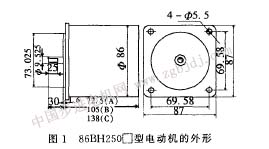
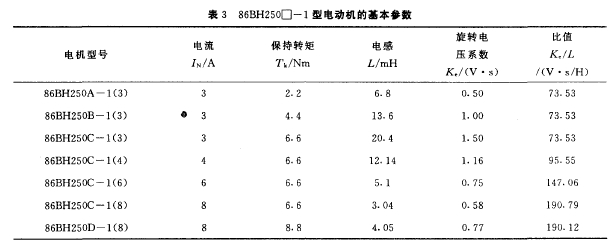
���ʽ ���M늙C���D���ǷֶνY�������ι��Ƭ���ɵ��F�����g�A��һƬ�S���ŵ������w�M��һ����Ԫ����ϵ�в��M늄әC�У�ͬһ�C��̖����ͬ�_Ƭ��늄әC���D���F�Ŀ�����1����2�����������Ć�Ԫ���ɣ����ɲ�ͬҎ���늄әC���������F���L�ȳɱ����������D��Ҳ�ɱ������L����������@�M�є���׃���@�M��늸к����D늉�ϵ��Ҳ����������1�г����������麣�\��늙C����˾���a��86��C��������ʽ���M늄әC�IJ��֮aƷ�����������γߴ���D1��ʾ�� ��1������ͬһ�C��̖�L��늙C�c�̵�늙C��ȣ������D�ؿ��Գɱ����L���������K����L�ı�ֵ������׃�����������ż�늉���׃����r�£�****�������ʺ�****���ù��ʼ��������ͬ��С��늙C�D��СһЩ���D�ٿ��Ըߣ����늄әC�D�ش��D��ƫ�ͣ�����****���ù�����ͬҲ����֡�
�D2��86BH250B (3)��86BH250c,(3)�әC���y�Ġ������ԣ�fe��-f��̎�Ƕ����������ԵĽ��c����fe��>fi���l��ȣ�С늄әC�Ġ������ʺ͠����D�ظ���һЩ����Ҋ�����Ñ��ڰl�F���M�ӆ�Ԫ���d�����Ըв���r�����ε��J�����1�_�����D�ش��늄әC���ܽ�Q���}���J�R��Ƭ��ġ��@Ҫ�����Ă��l��Ď��d�������㣬������^���l���D�ز����Ǻܺ��k����86BH250B(3)�Ğ�86BH250c(3)�������D�����ஔ�����ߣ���r�͕����ƣ�������Ǹ��l�Σ�fcp>f̎�D�ز��㣬�ǾͲ�һ���ˣ��ijɞ�86BH250C (3)��r����������ԓ�l��86BH250C(3)�Ġ����D�غ��ʱ�86BH250B(3)߀ҪСһЩ��
4 ��Ȧ�є���Ӱ�
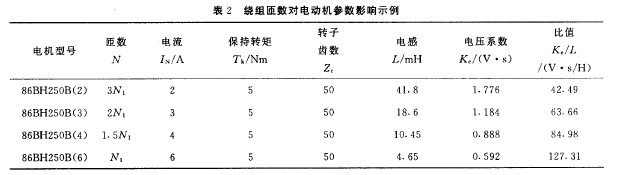
���ʽ���M늄әCҪ�a��һ�����D�أ�ÿ�O�ϵľ�Ȧ��Ҫ�����İ��є����@��������є��ij˷e���������СһЩ�є���һЩ��Ҳ���������һЩ�є���һЩ�������є���׃��늄әC�ı����D��Ҳ��׃��늄әC�����D�Б�늉��c�@�M�є�(��)�����ȣ��@�M늸��c�@�M�є���ƽ�������ȣ����ǵõ���ֵ�c�є����Pϵ��
��Ʃ��ֵ�c��Ȧ�є��ɷ��ȣ���Ҋ늄әC�Ġ���������V��׃�ėl����Ҳ�c�є��ɷ��ȡ��є��p�٣�****������ݔ���������ӡ���86BH250B��늄әC�������@�M�є���׃�r��������׃������r���2��ʾ��
��2��������ر�����ͬһ�_늄әC�ı����D�ز��ܸ�׃��****ݔ�����ʅs����ͨ�^�p���є��Ӵ�����������@��늄әC�ĽǶȿ����������Ҫ������@�M늸МpС��ʹ�ÿɿ��l���،��D�����ߵľ��ʡ��������ĽǶȿ������H�Ϝp���є�Ҫ���ṩ����Ľo��������ڹ��ż�늉���׃�ėl���£������˿��ṩ�Ĺ��ʣ��@���ǜp���є�����ӆ�Ԫ���ù��ʵ�ǰ��l�������늄әC��****ݔ�����ʣ�Ҫ�������������������ڹ��ż�늉���׃�ėl��������������@�Ǻ���Ȼ�ģ���錦늄әC���f�]�и����ݔ�빦���ṩ����ô���ܕ�����ݔ�����ʡ�
5 늄әC��ϵ�y�����OӋ��Ӱ�
��ϵ�y�ă����OӋ�ǻ��ʽ���M늄әC�OӋ�ĸ������}���漰������ϵ�y���Ўγߴ�ă�����߀�Ќ��Ų��Ϻ����Ų����x�õȆ��}[2]�����Ǐ��s�������ڱ���ӑՓ�ķ������@��ֻ��ĸ����\�����ܵĽǶȣ���������Ŀ�����һЩҊ�⡣
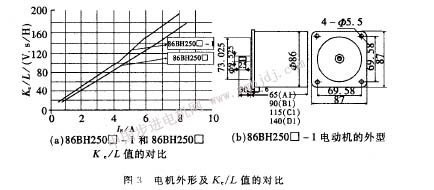
ǰ���ӑՓ�ѽ��ó��������D���F�Ć�Ԫ��****ݔ�����ʻ�����׃���Pϵ����Ҫ������ֵK����Lͬ�r�����������pС�ľ��ʡ�������Mһ���F�Ć�Ԫ늄әC���OӋ����ʹ��Ke�����L��׃������K����̫��L��һЩ����ֻҪʹK����L���Ϳ���ʹ****ݔ���������ӡ������@�ӵ�˼·����늄әC�Ĵ�ϵ�y�����OӋ�������˸��M��86BH250��-1ϵ�в��M늄әC��������������3��ʾ����늄әC��K����L��ֵ�cԭ86BH250������������ӣ���D3��ʾ��
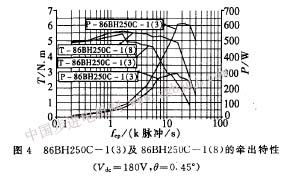
�D4ʾ��86BH250C-1(3)�Č��y�������ԣ����Կ����������ʱ�86BH250C(3)�����ˡ�
�D4��߀�o��86BH250C-1(8)�Ġ������ԣ�****���������_620W��****���ù��ʼs��440W������86#�C���Ļ��ʽ���M늄әC�����Q��ݔ�����ʵĹ�܊�ˡ�
6 �Y Փ
(1)��߲��M�ӆ�Ԫ�ĸ����\�����ܣ�����Ҫ��������َ��d��������������Ȯ�������ʻ�****���ù��ʁ���������\�����ܵ�ָ���Ǻ��m�ġ�
(2)���ӆ�Ԫ****������������ҪӰ푵Ļ�����������������늉�(Vd��)�����(/N)��늄әC���D���X��(Z��)�����D늉�ϵ��(K��)���@�M늸�(L)��
(3)���ʽ���M늄әC�F�Ć�Ԫ�����ӣ�늄әC���L�r�������D�ؿ��Գɱ�������****�������ʅs��׃��
(4)늄әC�@�M�є��p�ٕr���@�M����������������������늄әC�ı����D�ز�׃��****�������ʅs�����ˡ�
(5)��ϵ�y�ă�������(K����L)��ֵ****��Ŀ�ˣ��п��ܫ@��****�������ʵ����������\�����ܵ���ߡ�
(6)86BH250C-1(8)�cMC - 21812�����ӆ�Ԫ���_���˺ܸߵĸ����\������ָ�ˡ�
|