���M늙C��һ�N��������õ��طN늙C���������D���Թ̶��ĽǶȣ��Q�顰����ǡ���һ��һ���\�еģ������c�Ǜ]�зe���`����Ȟ�ٷ�֮100������λ���Ȟ�ÿ��X�ٷ�֮5�����ԏV�������ڸ��N�_�h���ơ����M늙C���\��Ҫ��һ����b���M���ӣ��@�N�b�þ��Dz��M늙C���������ǰѿ���ϵ�y�l�����}�_��̖�D���鲽�M늙C�Ľ�λ�ƣ������f������ϵ�yÿ�lһ���}�_��̖��ͨ�^������ʹ���M늙C���Dһ����ǡ����Բ��M늙C���D���c�}�_��̖���l�ʳ����ȡ��mȻ���M늙C�ѱ��V���ؑ��ã������M늙C����������ͨ��ֱ��늙C������늙C�ڳ�Ҏ��ʹ�á���������p�h���}�_��̖���������·�ȽM�ɿ���ϵ�y����ʹ�á�����úò��M늙C�s�����£����漰���Cе��늙C����Ӽ�Ӌ��C���S�����I֪�R��
����������Ñ��˽ⲽ�M늙C�����M늙C�������x�����m���Լ�ʹ��Ҫ��IJ��M늙C�Ͳ��M늙C�������،����P�x��ԭ�t��B���£����H��������
1. ���ȴ_�����M늙C�τ�ؓ�d����Ҫ��Ť�ء�******�ķ�������ؓ�d�S�ϼ�һ�ܗU���Ï��ɳ����ӸܗU���������������L�ȼ���ؓ�d���ء�M=fXs���߸���ؓ�d���ԏ���Փ��Ӌ�������Ŀǰ���M늙Cֻ��ע****�o�D�࣬���M늙C��****�o�D����^45Nm ������Խ�ɱ�Խ�ߣ���������x���늙C�����^����^�˷��������Կ��]����p���b�á�
2. �_�����M늙C��****�\���D�١��D��ָ���ڲ��M늙C���xȡ�r���P��Ҫ�����M늙C���������S��늙C�D�ٵ����ߣ�Ť���½������½��Ŀ����ͺܶ��������P���� : ��������늉���늙C���������늙C����늸С�늙C��С�ȵȣ�һ���Ҏ���ǣ���늉�Խ�ߣ������½�Խ����늙C�������Խ�������½�Խ�������OӋ�����r��һ���Ҏ�ɑ�ʹ늙C���D�ٿ����ڎװ��D/�֣���Ȼ����Ҳ�У����ԅ������� - �l���ԡ���
3. ����ؓ�d****���غ�****�D���@�ɂ���Ҫָ�ˣ��م������� - �l���ԡ����Ϳ����x����m���Լ��IJ��M늙C��������J���Լ��x����늙C̫���Կ��]����p���b�ã��@�ӿ��Թ��s�ɱ���Ҳ����ʹ�����OӋ���`�Ҫ�x��ú��m�Ĝp�ٱȣ�Ҫ�C�Ͽ��]���غ��ٶȵ��Pϵ���x���****������
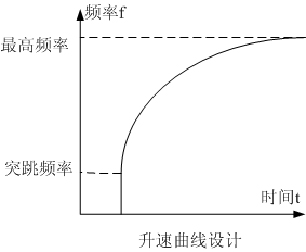
4�����M늙C�ٶȿ����ǿ�ݔ����}�_��̖��׃������׃�ģ�����Փ���f��ֻ��o�����}�_��̖���ɣ�ÿ�o����һ���}�_��CP�������M늙C�����Dһ������ǣ����֕r��һ�����ֲ���ǣ����nj��H�ϣ�����}�_CP��̖׃��̫�죬���M늙C���ڑT�Ԍ����S�������̖��׃�����@�r���a�����D�́G���F�����Բ��M늙C�چ��ӕr������������^�̣���ֹͣ�r����н����^�̡�һ����f���ٺͽ���Ҏ����ͬ���������ٞ�����B��
�����^����ͻ���l�ʼ����������M�ɣ������^�̷�֮����ͻ���l����ָ���M늙C���oֹ��B�rͻȻʩ�ӵ��}�_�����l�ʣ����l�ʲ���̫��tҲ���a�����D�́G��������������һ���ָ���������^���{��ָ����������ȻҲ�ɲ���ֱ�������������ȡ��Ñ�������Լ���ؓ�d�x����m��ͻ���l�ʺ��������������ҵ�һ�l����������������ף�һ����Ҫ��Ρ�ԇ�C�����С�ָ�������ڌ��Hܛ�������б��^�韩��һ��������Õr�g�������A��Ӌ��C���A���ȣ������^����ֱ���xȡ��
5. ���߀Ҫ���]����һ���ģ��� �ٷ�֮20�������������D��������
6. �M���x����ʽ���M늙C���������ܸ��ڷ�ӳʽ���M늙C��
7.�M���xȡ������������ʹ���������ڼ��֠�B�������\��������
8. �xȡ�r��������ֻ��늙C�����@һ��ָ�˵��`�^��Ҳ�����f����늙C��Ť��Խ��Խ�ã�Ҫ���ٶ�ָ��һ�]��ͬһϵ��늙Cֱ�����L����ͬ�������늙C���l���ܺã���֮��Ȼ��
9.���D��Ҫ���^�ߵ���r�¿����x����늉���һ�c�������ʹ����늙C��
10.���xُ�r�Dz��Ã��࣬�����߀������ģ��@���]��ʲô���w��Ҫ��ֻҪ������ܝM��ʹ��Ҫ����С������ԽС��늙C�\��Խƽ����
|











