늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)���ϙz�y(c��)�����о�
�RС�䣬�f(w��n)���|
���y����늾ֱ��o(h��)�Ԅ�(d��ng)�������y��750011��
ժҪ�����������Ƶ�늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)�錦(du��)��Փ����늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)���N��Ҋ(ji��n)늚�Ԫ�����ϺͽӾ�(xi��n)���ϙz�y(c��)��������Ҫ�У��ٿv�U��������λ�Ùz�y(c��)��늳ع��ϡ����ģʽ�z�y(c��)��MOS�ܹ����Լ��x܇(ch��)δ�B�ӹ��ϵȡ�������ģʽ���ϙz�y(c��)�����ͻ���늉���̖(h��o)��늄x܇(ch��)δ�B�ӹ��ϵȹ��ϵęz�y(c��)�������O������늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)�İ�ȫ�ԺͿɿ��ԣ�����һ���ą���ָ��(d��o)�r(ji��)ֵ��
�P(gu��n)�I�~��늄�(d��ng)݆�Σ������������ϙz�y(c��)��늉���̖(h��o)
�ЈD���(l��i)̖(h��o)��TP271+4��TP277 �īI(xi��n)��(bi��o)־�a��A ���¾�̖(h��o)��1001-6848(2010)06-0088-02
O�� ��
����һ��(g��)ȫ��(sh��)�ֻ���늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)������(y��ng)���Ԅ�(d��ng)��(sh��)�r(sh��)���M(j��n)�й����\�ࡢ���϶�λ���¹ʾo��̎���Լ���(b��o)���ȣ�����Һ�������M(j��n)���@ʾ����(d��ng)݆�������\(y��n)�Еr(sh��)����z�y(c��)�����ϣ�ϵ�y(t��ng)��(y��ng)��ʹ݆�ΰ�ȫ��ͣ��(l��i)���i������(d��ng)݆���oֹ�r(sh��)������z�y(c��)�����ϣ�ϵ�y(t��ng)��(y��ng)�܉������i��݆��[34]�����߽�(j��ng)�м�(x��)�������о����ó�늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)��(y��ng)�߂�ij�Ҋ(ji��n)���ϙz�y(c��)�(xi��ng)Ŀ���£�
(1)�ٿv�U���ϣ�
(2)늳ع��ϣ�
(3)���ģʽ�z�y(c��)��
(4) MOS�ܹ��ϣ�
(5)�x܇(ch��)���ϣ��������҄x܇(ch��)����
1���N���ϙz�y(c��)�㷨�о�
1.1�ٿv�U����
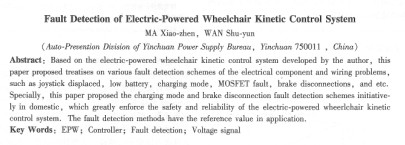
�Ҋ(ji��n)�IJٿv�U��������늄�(d��ng)݆�ο��������֮ǰ���ٿv�U��������ij�Nԭ��ƫ�x������λ�ã�����늳��ڣ�����ɳ����ʼ�������Ժ����șz�y(c��)�ٿv�U�Ƿ�������λ�ã������������λ�ã��t�Q�ш�(b��o)��5s������Һ��������ʾ���ٿv�U��������λ�á������5s֮��(n��i)��ጷŲٿv�Uʹ��ؚw����λ�ã��t݆�������\(y��n)�У���t��5s֮��݆�Ό����i�����������̈D��D1��ʾ��
1.2늳ع���
늄�(d��ng)݆�ε�늳�����ęz�y(c��)��ͨ�^(gu��)AD�ɘӲ��D(zhu��n)����ʮ�M(j��n)�Ɣ�(sh��)��Һ���@ʾ����ݔ������(d��ng)����ϵ�y(t��ng)�z�y(c��)��늳�늉�����ij���ޕr(sh��)�����������(q��)��(d��ng)늙C(j��)�r(sh��)����������(hu��)��(b��o)��һ�Εr(sh��)�g�����݆�δ˕r(sh��)�����\(y��n)�У��t��������(b��o)��1 rmn���ܱ��l���Խo�Ñ�(h��)���ĕr(sh��)�gͣ܇(ch��)�����݆���oֹ���t��������(b��o)��5s���ܱ��l��ͬ�r(sh��)Һ���@ʾ늳�늉����㣬�o�������ʾ����(d��ng)늳�늉�����ij���ޕr(sh��)����(d��ng)݆�������Ƅ�(d��ng)�r(sh��)��ؓ(f��)�d����^�˕r(sh��)AD�ɘ����õ���늉�ֵ�������r(sh��)ҪС�ö࣬��Ȼ�����挍(sh��)��늳�늉�ֵ���@����Ҫ��(du��)�ɘ�ֵ�M(j��n)�ОV��̎�������IJ��ó����Д��V����������(j��)��(j��ng)�(y��n)�Д�_���ɴβɘ����S��****ƫ�Y�����Ⱥ�ɴεIJɘ�ֵ�IJ�ֵ���ڦ�Y���t����ݔ����̖(h��o)�Ǹɔ_��̖(h��o)����(y��ng)ԓȥ���������ϴβɘ�ֵ���鱾�βɘ�ֵ����С��AY���t���βɘ�ֵ��Ч���ڱ�����ȡ��Y=5 V��
1.3 MOS�ܹ��ϙz�y(c��)����
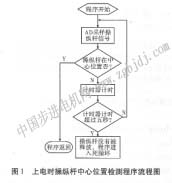
늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)�{(di��o)��ʾ��D��D2��ʾ��
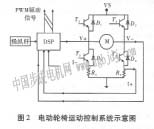
�ɈD2Ҋ(ji��n)��늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)���Ѓɂ�(g��)H���Ă�(g��)�¹ܡ�����H��һ��(g��)�¹ܞ�����(l��i)�f(shu��)��������̖(h��o)�a(ch��n)���·�Ĺ���ԭ������D3��ʾ��MCP14066��һ��(g��)��·�x��������(d��ng)���ƶ˞���ƽ�r(sh��)������(y��ng)��ݔ�����̖(h��o)�͕�(hu��)�Č�(du��)��(y��ng)��ݔ����ݔ������(d��ng)���ƶ��ǵ��ƽ�ĕr(sh��)��Փݔ�����ʲô��̖(h��o)��ݔ������ͣ�Ҳ�����f(shu��)14066�ஔ(d��ng)��һ��(g��)�c�T(m��n)������MOS�ܵ�©�O�͖ŘO����̖(h��o)���Ƿ���ģ����ԽY(ji��)��MCP14066��·�x���������c(di��n)����MOS�ܵĖŘO�(q��)��(d��ng)��̖(h��o)�����·�x�����Ŀ�����̖(h��o)������MOS�ܵ�©�O�ƽ����ݔ����̖(h��o)��Ȼ����(d��ng)MOS�ܔ�·���ŘO�(q��)��(d��ng)����ƽ�r(sh��)������MOS�ܛ](m��i)�Ќ�(d��o)ͨ���ʶ�·�x������ݔ���͞���ƽ���@���ǹ�����̖(h��o)����(d��ng)MOS�ܶ�·�r(sh��)�����¹ܾ͕�(hu��)��˲�gֱͨ��****�������@����MOS�ܔ�·���ϙz�y(c��)��ԭ����
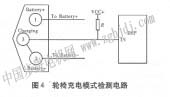
1.4���ģʽ�z�y(c��)
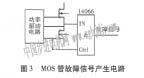
��(d��ng)݆�����ڳ�늕r(sh��)���Dz����S݆�Ύ���������\(y��n)�еģ���ˣ���(d��ng)݆����늕r(sh��)���z�y(c��)��݆�����ڱ���늣�݆�Ό����i�������o����(b��o)����ʾ��݆�����ڳ�늡������ģʽ�z�y(c��)�·ʾ��D��D4��ʾ��
�ɈD4���ij������(l��i)�IJ��^������(g��)���_���������_1�����_2�քe���Á�(l��i)��늳ص���ؓ(f��)�O�ģ������_3���Á�(l��i)���oDSP I/O���_�ģ�݆�Λ](m��i)�б���늕r(sh��)�������_��������������늺�������������DSP�z�y(c��)��ԓ���_���ƽ����ƽ������(d��ng)݆�α���늕r(sh��)���������_3�����_2�����ͳ����ݔ��ؓ(f��)�����B�����B��DSP���@��(g��)I/O���_��׃?y��u)���ƽ����ˮ?d��ng)DSP�z�y(c��)��ԓ���_����ƽ�ĕr(sh��)�����J(r��n)��݆��̎�ڳ�늠�B(t��i)���˕r(sh��)�o��Һ��ָʾ���i��݆�Ρ����ģʽ���ϙz�y(c��)�����������ڿ����^(gu��)���е�һ��(g��)���c(di��n)��
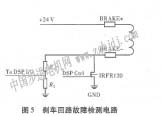
1.5�x܇(ch��)��·���ϙz�y(c��)
늄�(d��ng)݆�εĄx܇(ch��)��·��D5��ʾ����(d��ng)DSPݔ������IRFR120�܌�(d��o)ͨ�r(sh��)���x܇(ch��)��·ͨ늣��x܇(ch��)���l��݆�ο��������{��(sh��)�H�ϣ�늄�(d��ng)݆���(q��)��(d��ng)늙C(j��)�Ąx܇(ch��)��һ��(g��)�ݾ�(xi��n)��늌�(d��o)�ܣ�������r����ֱͨ���ġ�
�x܇(ch��)��·���ϙz�y(c��)ԭ����D5��ʾ����To DSP E��O���c��DSP Ctrl����DSP��I/O���_����DSP Ctrl���ǿ���IRFR120ͨ��ģ�����To DSP I/O�����Á�(l��i)�z�y(c��)�x܇(ch��)��·���ϵġ���(d��ng)��DSP Ctrl������ʹ��IRFR120�P(gu��n)�࣬���x܇(ch��)���ݾ�(xi��n)�Ό�(d��o)�ܺ̈́x܇(ch��)�B�Ӷ���Õr(sh��)��DSP�ġ�To DSP I/O�����_�ό��z�y(c��)�����ƽ��̖(h��o)����(d��ng)�x܇(ch��)��|δ�B�Ӻû�x܇(ch��)���ݾ�(xi��n)�Ό�(d��o)늹ܟ����r(sh��)��DSP�ġ�To DSP l/0��ֻ�ܙz�y(c��)�����ƽ��̖(h��o)���˕r(sh��)������J(r��n)��x܇(ch��)��·�й��ϣ��������Q�Ѻͽo��Һ���@ʾ�����i��݆�Ρ�
2�Y(ji��)�Z(y��)
�������������Ƶ�늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)�錦(du��)�ɹ��о�����늄�(d��ng)݆���\(y��n)��(d��ng)����ϵ�y(t��ng)���N��Ҋ(ji��n)���ϵęz�y(c��)��������Ҫ�����(xi��ng)Ŀ�Dzٿv��������λ�ù��ϡ�늳ع��ϡ�MOS�ܹ��ϡ����ģʽ�z�y(c��)���x܇(ch��)��·���ϵȡ��O(sh��)Ӌ(j��)r����DSP��(sh��)����̖(h��o)̎����Ӳ�����ϙz�y(c��)��������(j��ng)�^(gu��)ϵ�y(t��ng)�\(y��n)���{(di��o)ԇ���(y��n)�C�˸��N���ϙz�y(c��)�·Ӳ���O(sh��)Ӌ(j��)�����õĺ����ԡ�
��֮�����������݆���\(y��n)��(d��ng)����ϵ�y(t��ng)�ĸ��N��Ҋ(ji��n)���ϙz�y(c��)�����O(sh��)Ӌ(j��)���{(di��o)ԇ��ԇ�\(y��n)�У����N���Ͼ��ܱ��z�y(c��)���(y��n)�C��Ӳ��ܛ�����������_�Լ������ԡ�
|